Traffic Owl


AI-supported traffic light system for pedestrian crossings
Overview
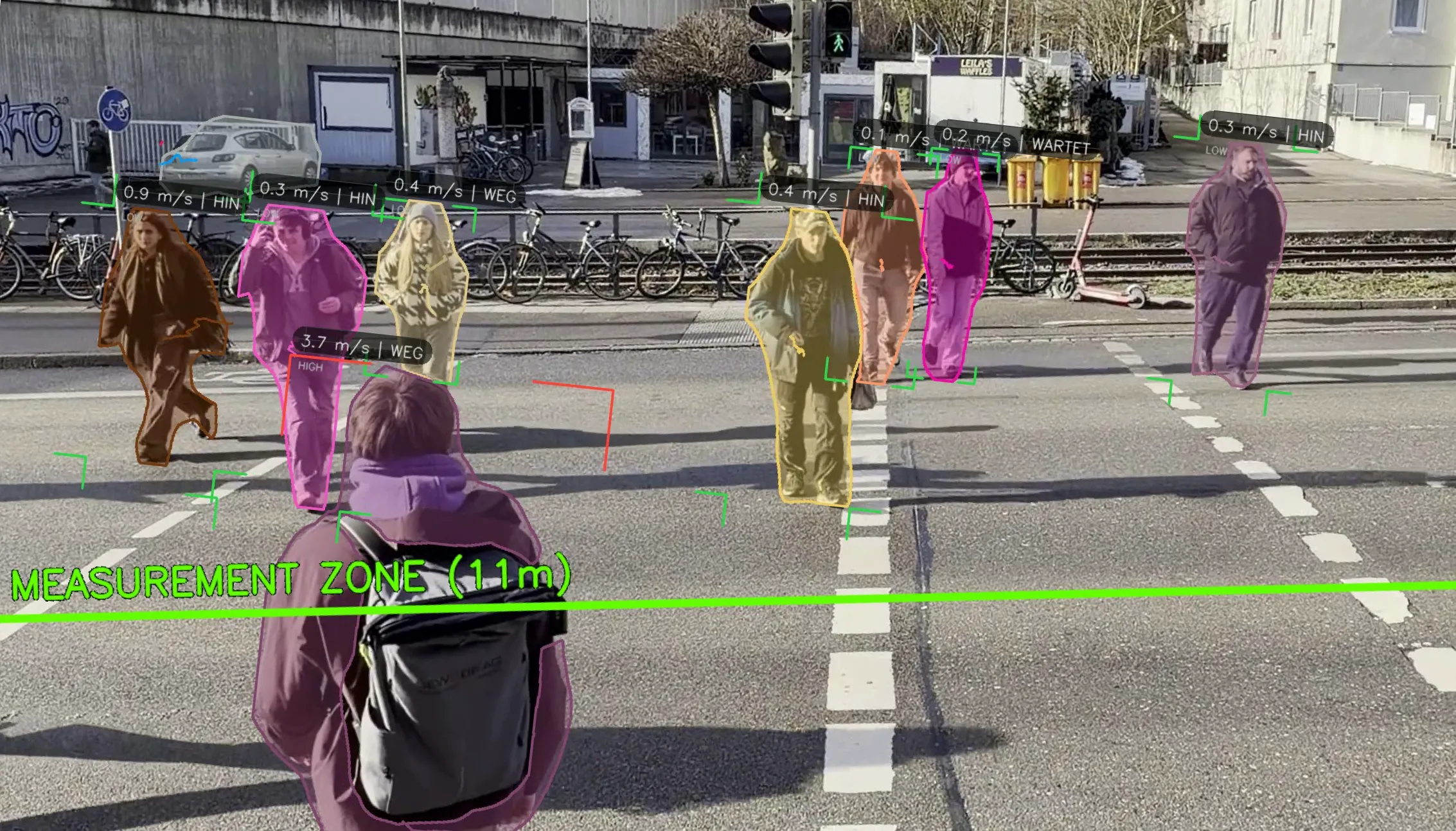
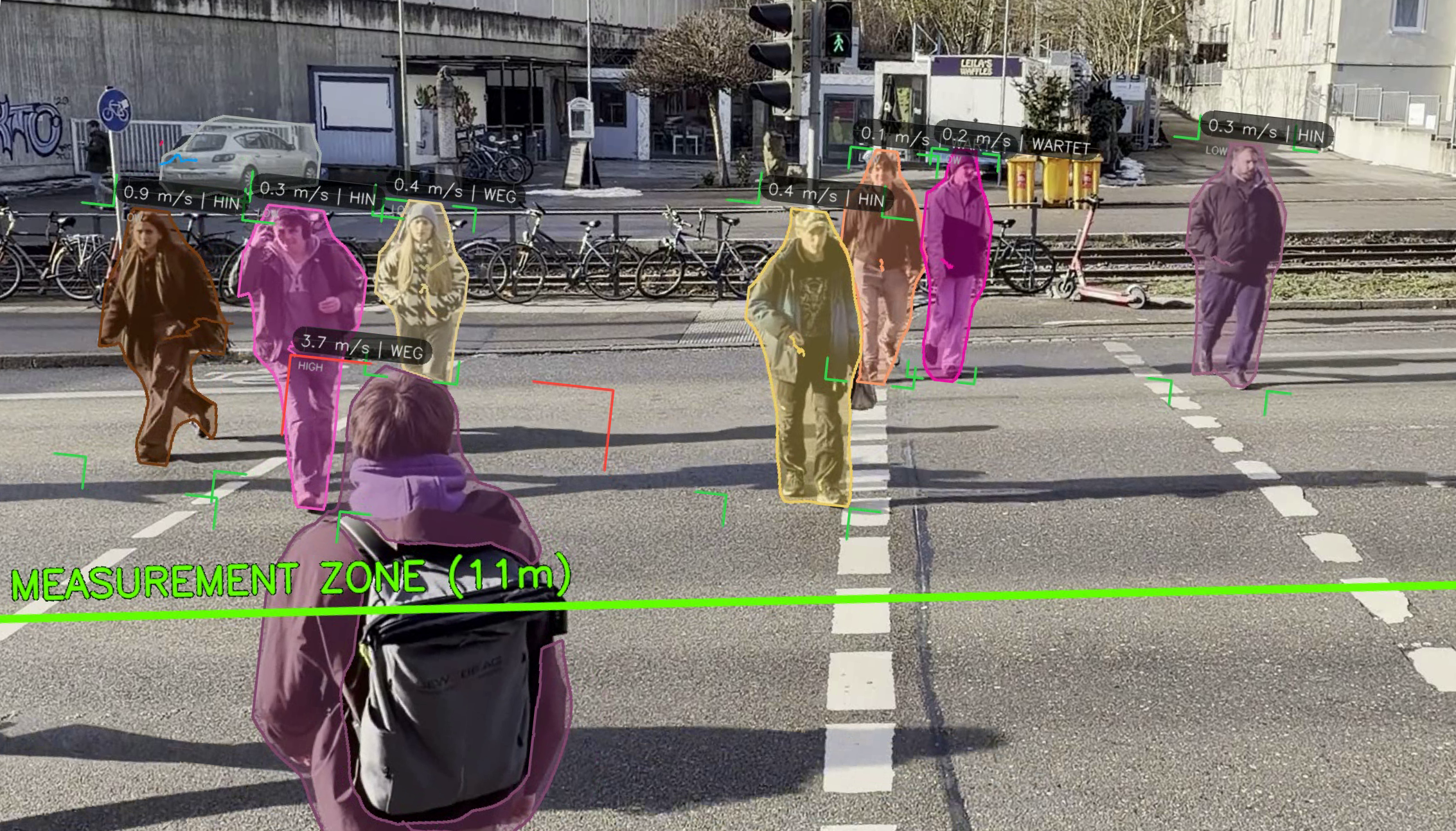
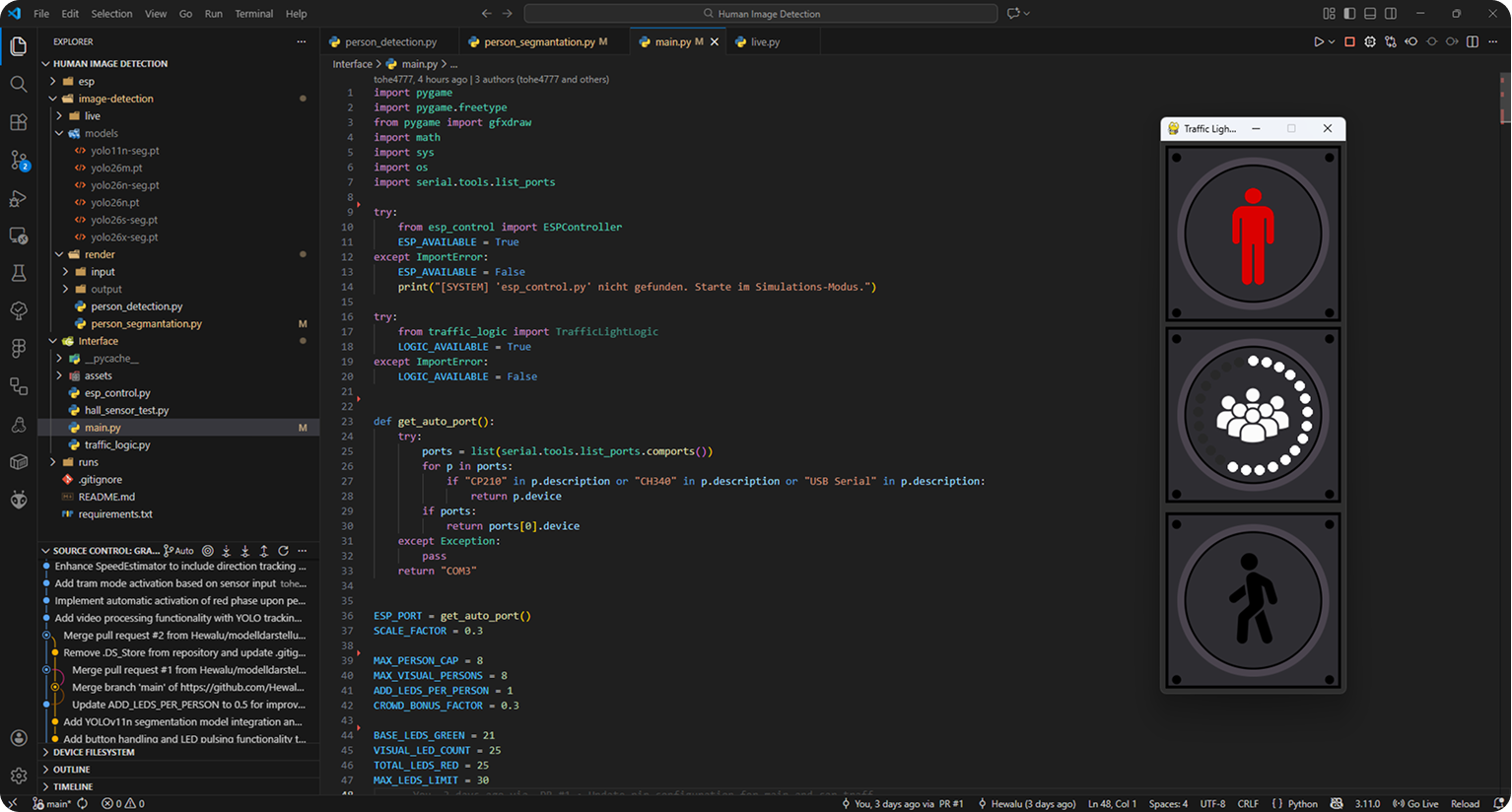
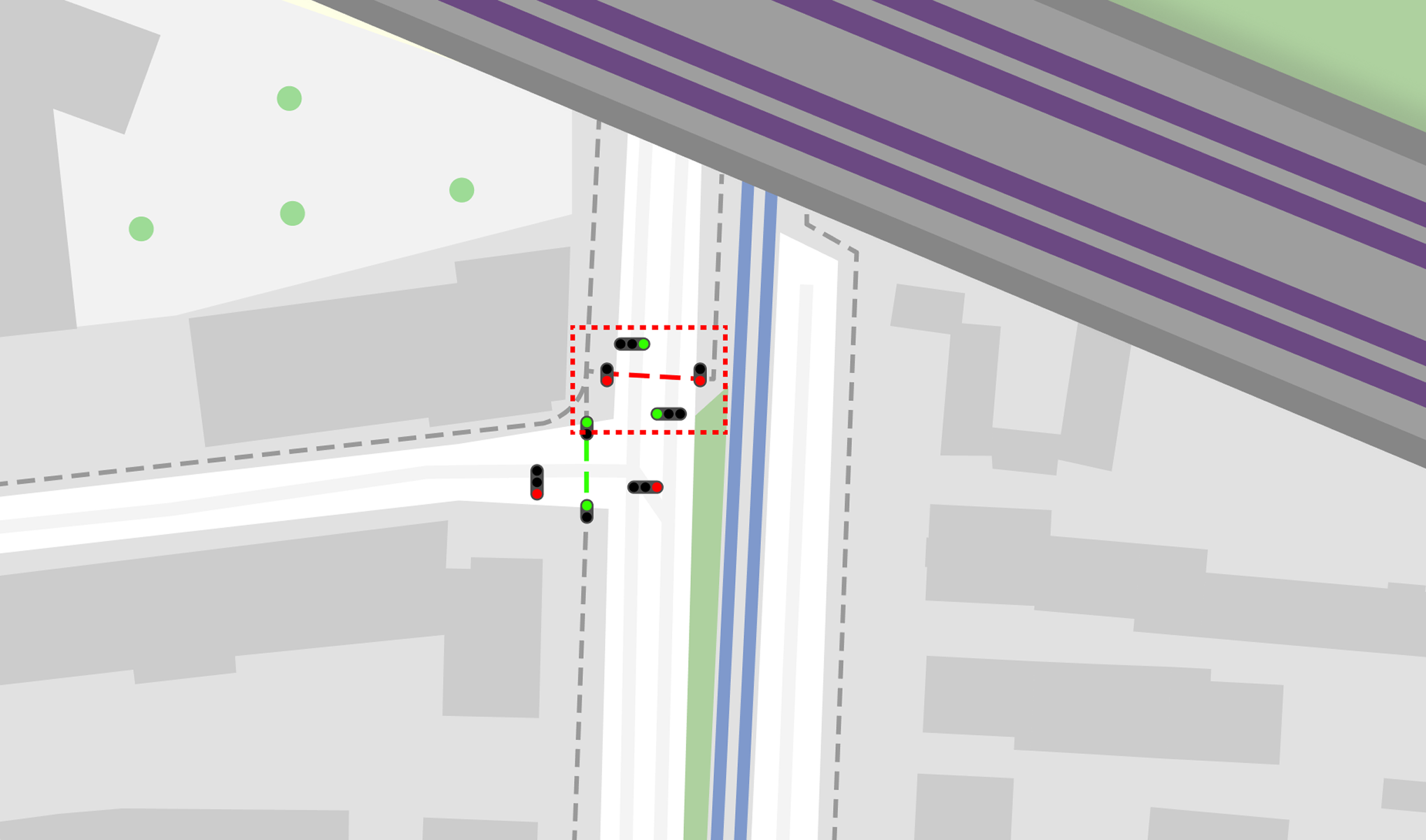
Traffic Owl is a camera-based, adaptive traffic control system that responds to real-time road events using object detection and segmentation. Developed in collaboration with Yunex Traffic as part of a student program, the project aims to reduce waiting times and dynamically coordinate pedestrian, car, and tram traffic..
Challenge
Fixed traffic light cycles often conflict with real-world dynamics: large groups of pedestrians arrive simultaneously, waiting times become unnecessarily long, and unsafe crossing behavior can occur — especially at tram interchanges.
Concept & Implementation
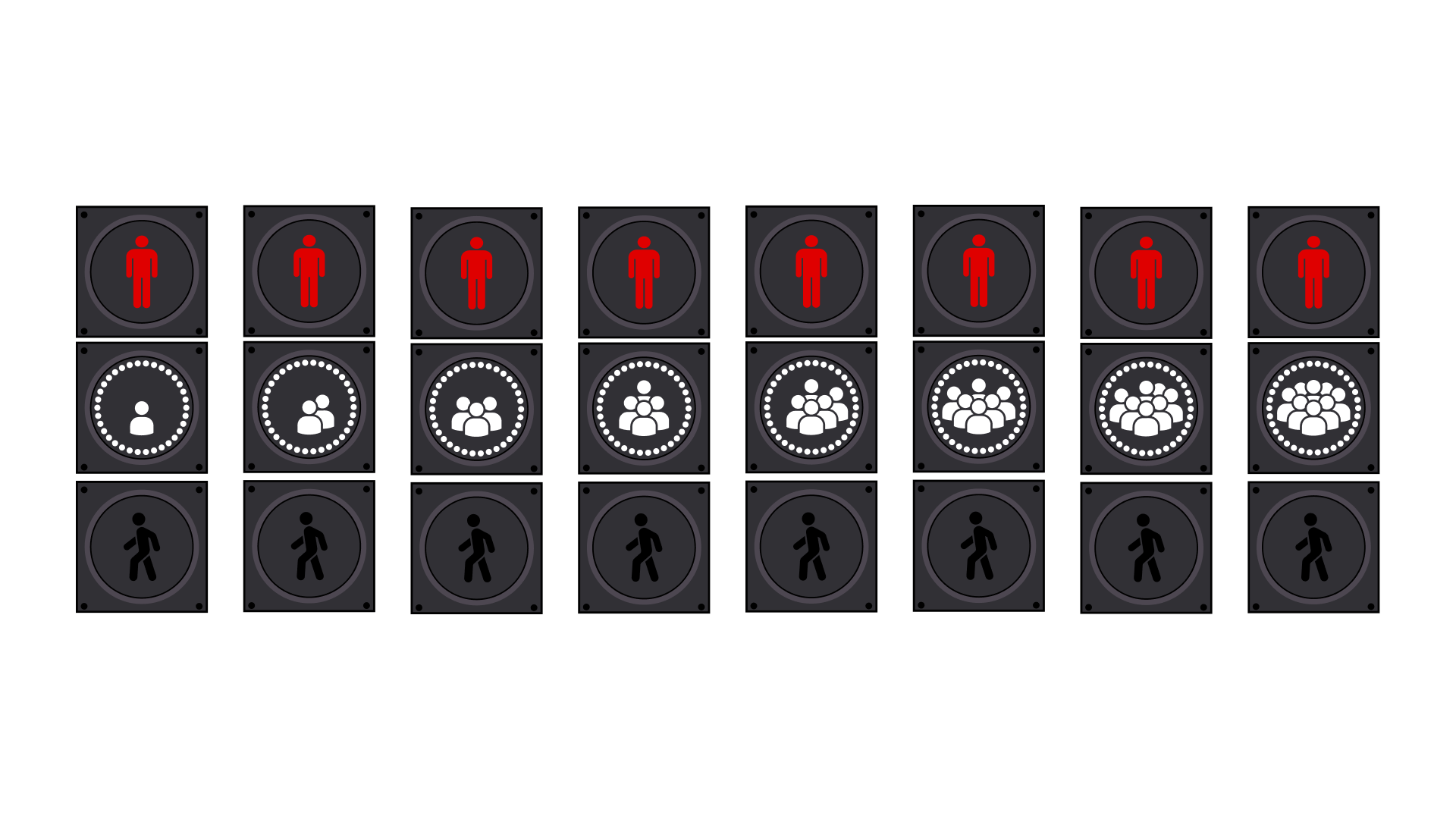
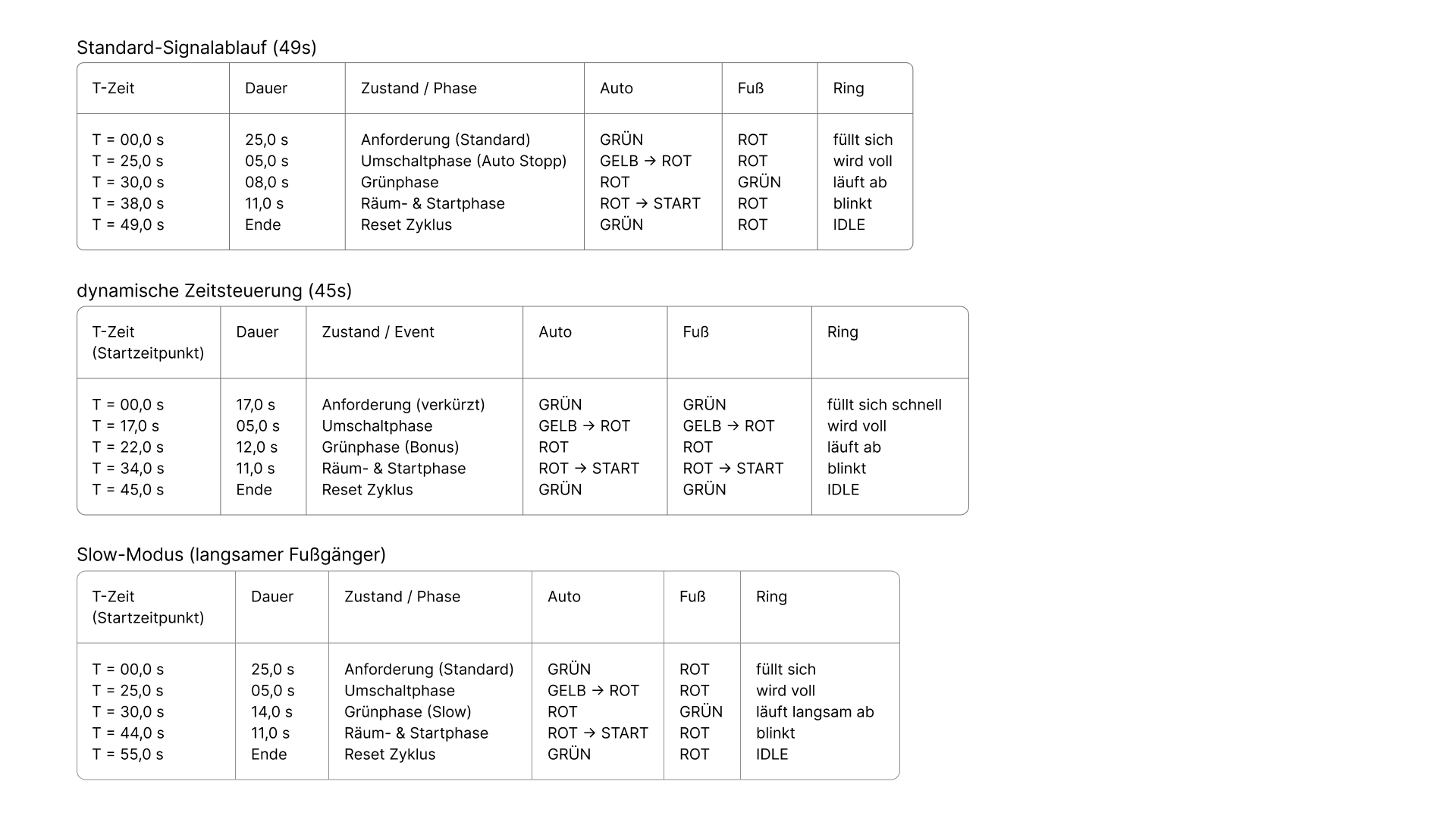
The system uses AI-based detection to identify pedestrians and analyze their behavior in real time. Based on this data, traffic light phases are dynamically adjusted. The prototype processes live traffic flows, adaptively controls signal timing, and provides visual feedback to make its decisions transparent — resulting in reduced waiting times and smoother traffic flow.
Showroom




E-Pen

Handwriting reconstruction using ML Time Series Classification
Overview
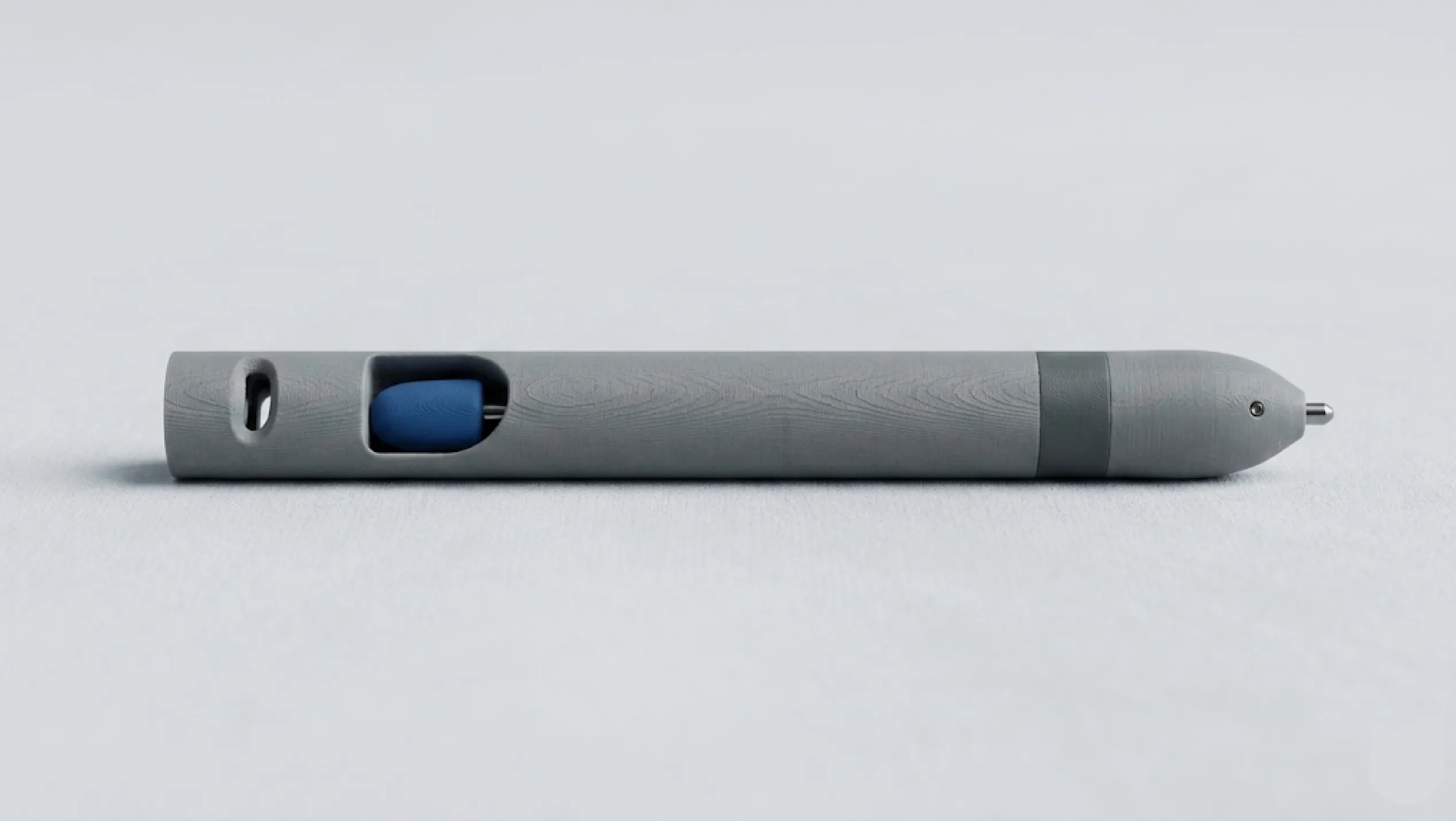
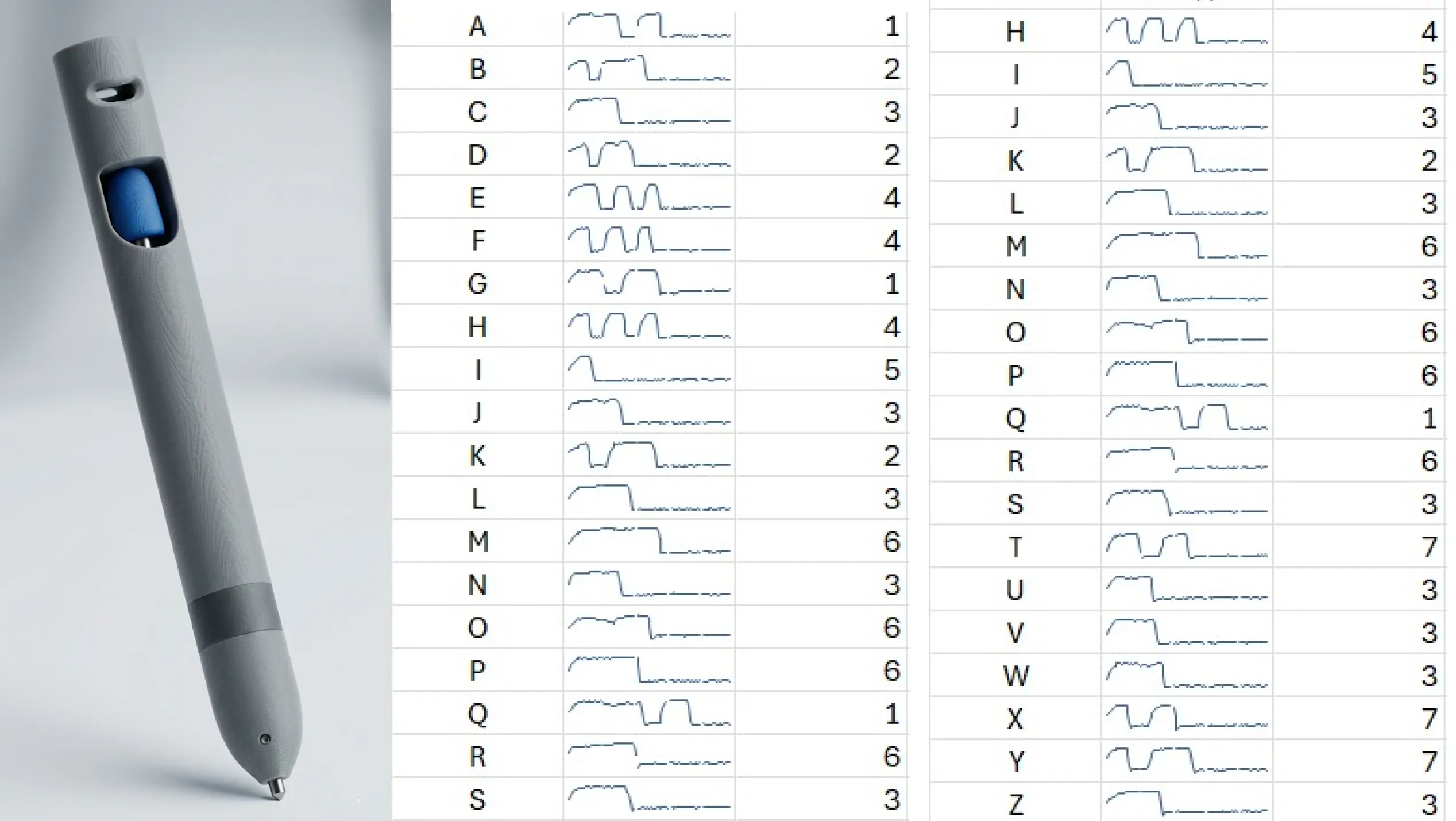
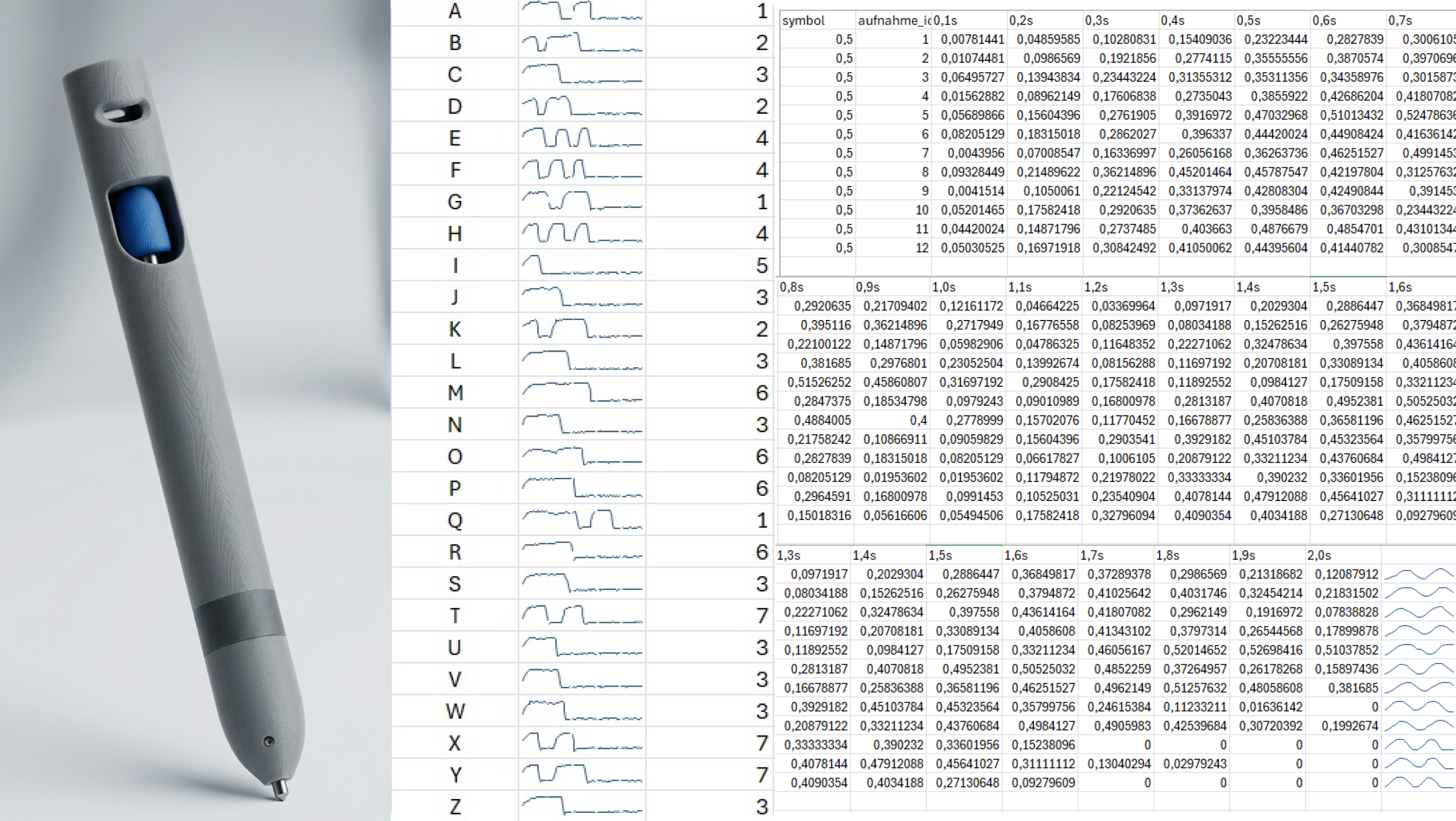
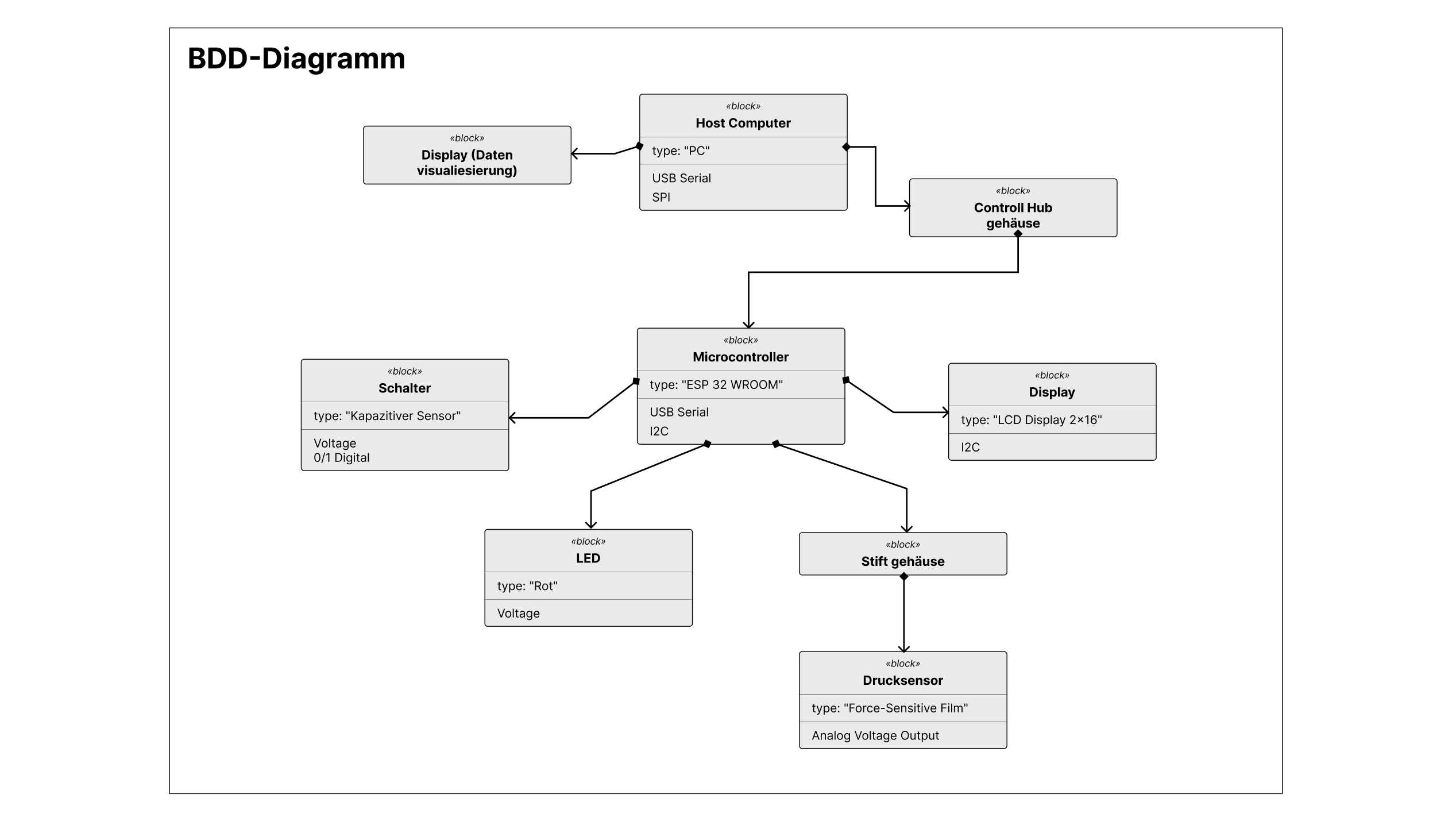
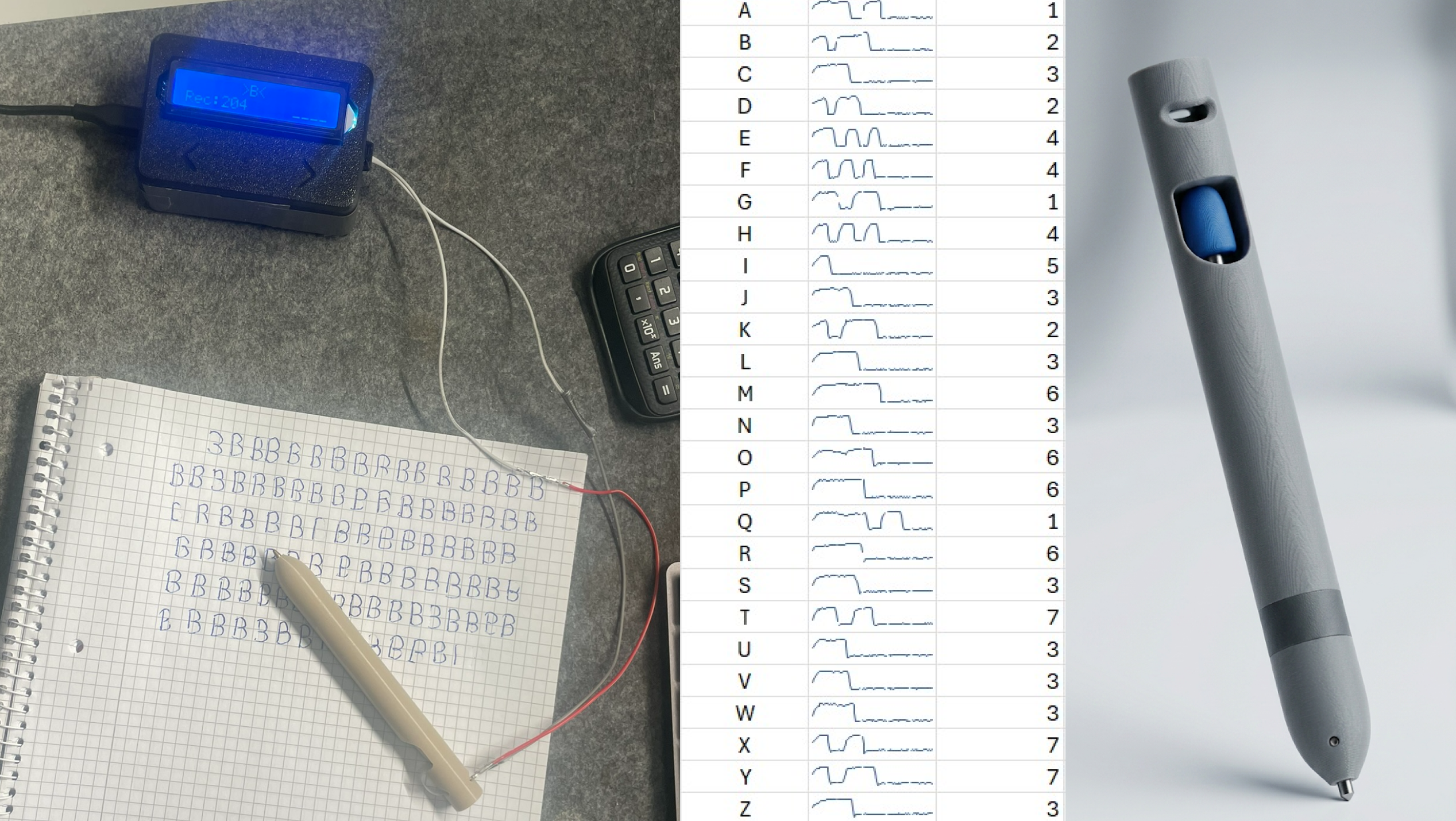
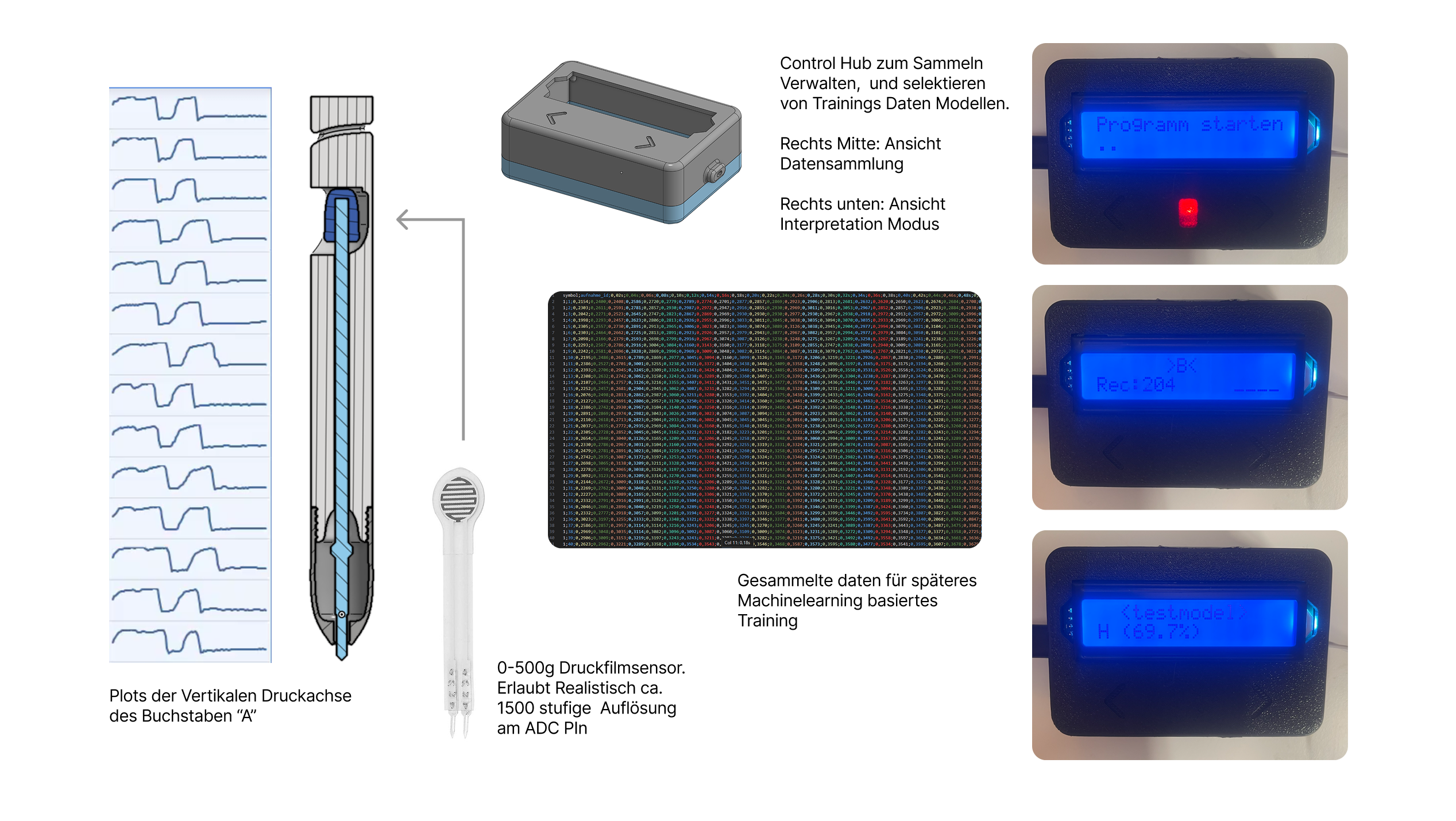
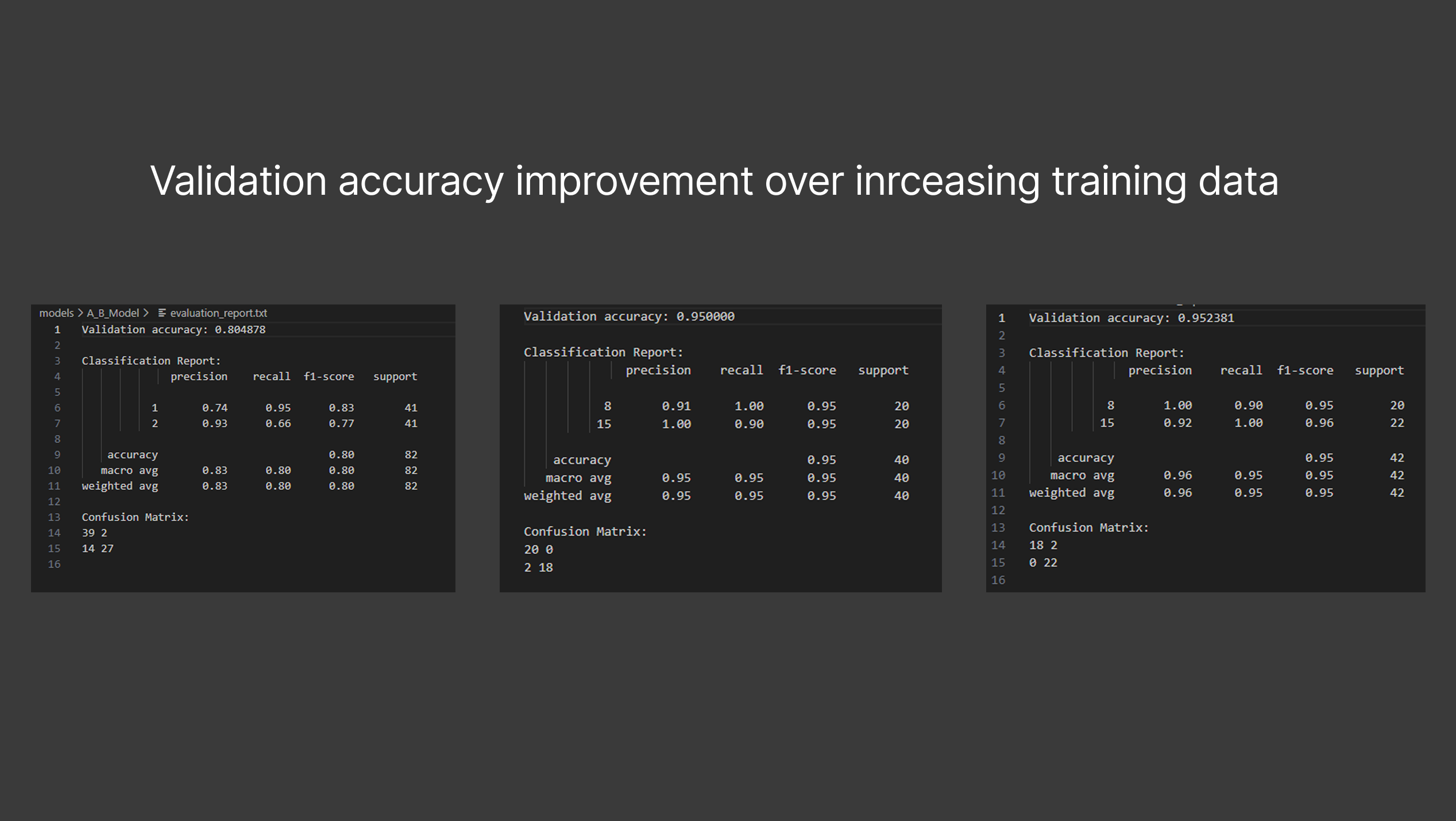
E-PEN is an experimental input system that captures handwriting through a one-dimensional pressure signal and reconstructs it into text using machine learning techniques. The project explores how much information density is actually required, with the result that surprisingly robust reconstructions are possible even with minimal data.
Challenge
The central challenge was the extremely limited data basis: a single sensor provides only one-dimensional time series data without any spatial information. To still achieve usable results, extensive data collection and the targeted use of contextual information were essential.
Concept & Implementation
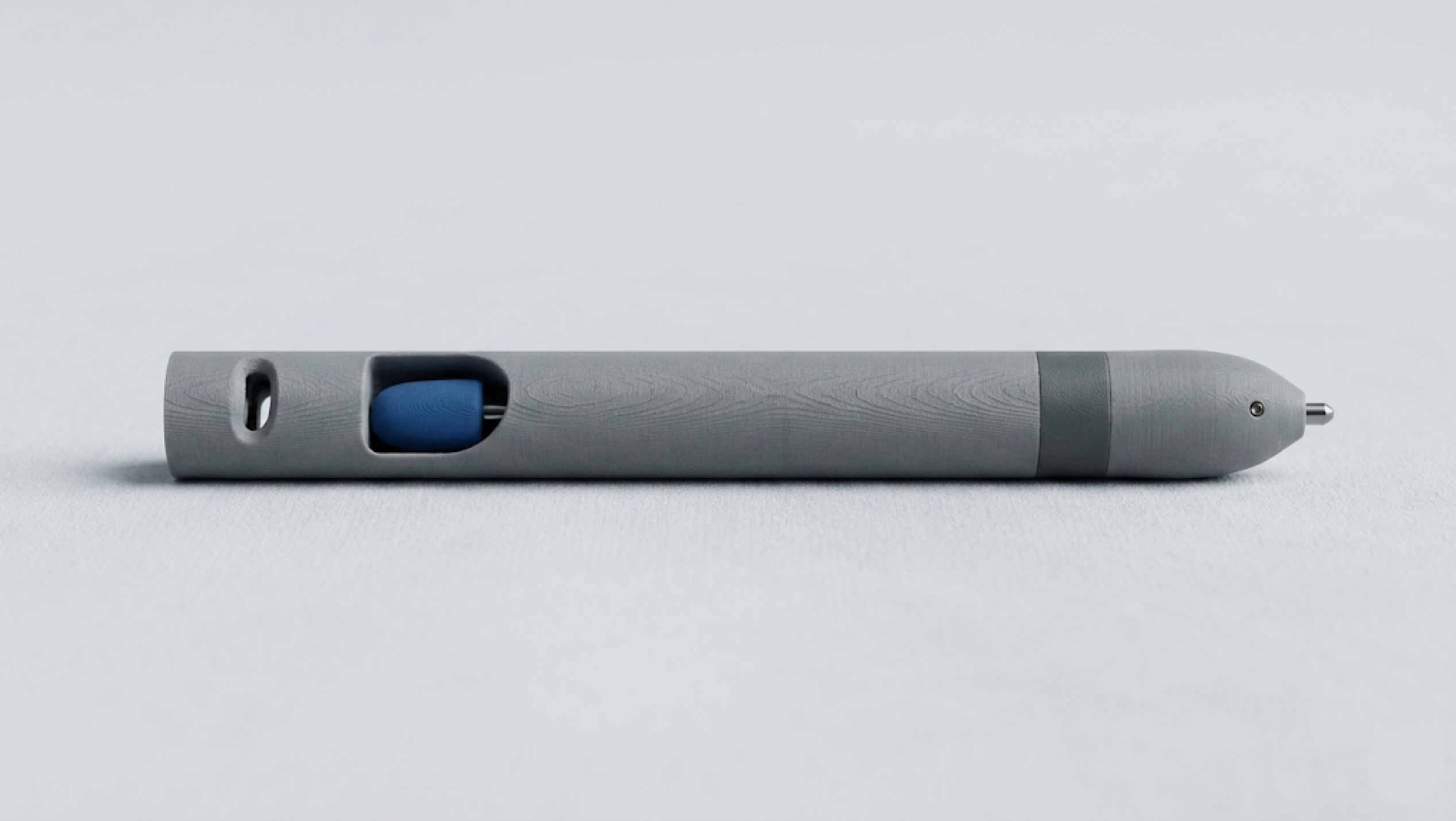
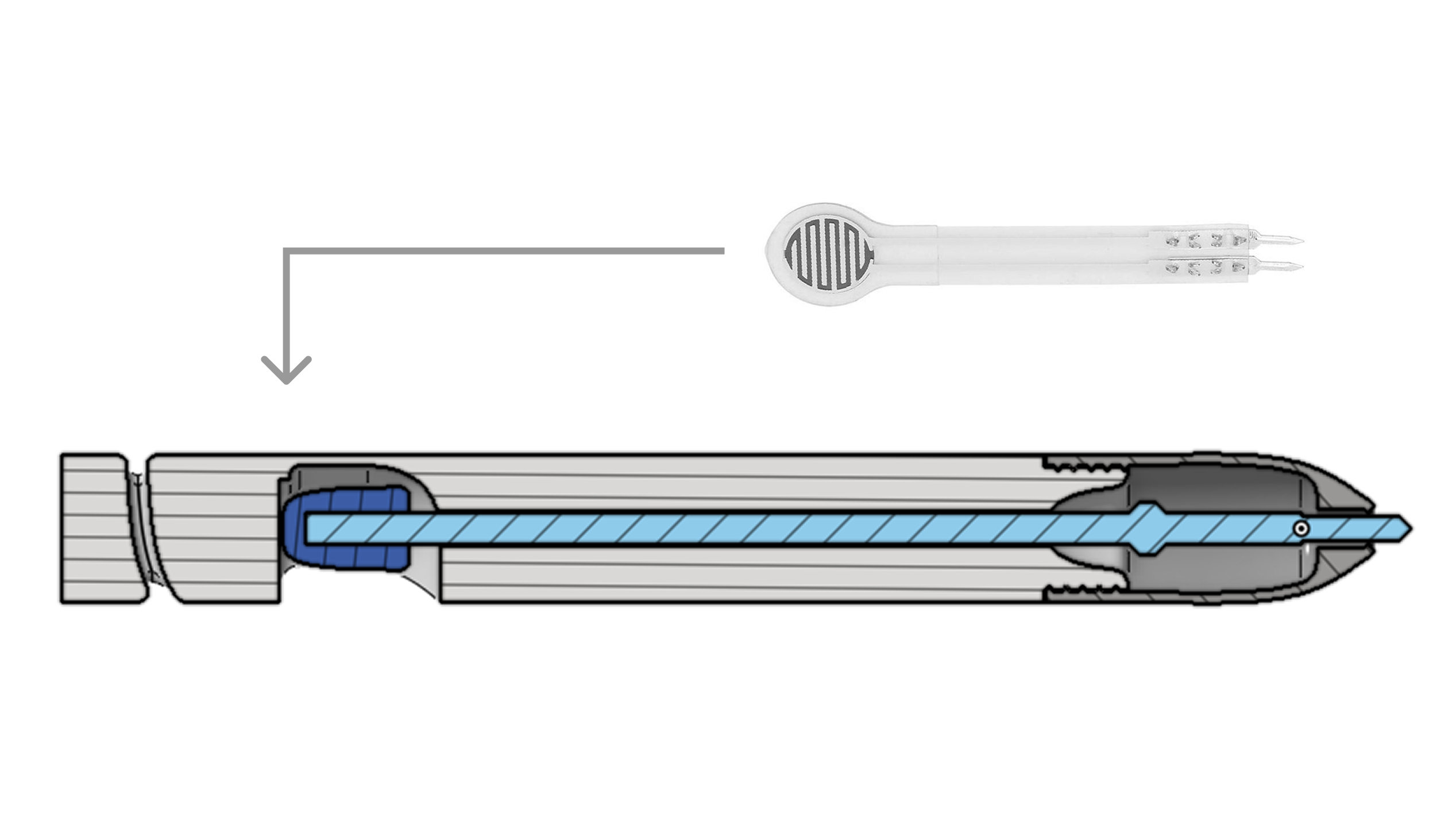
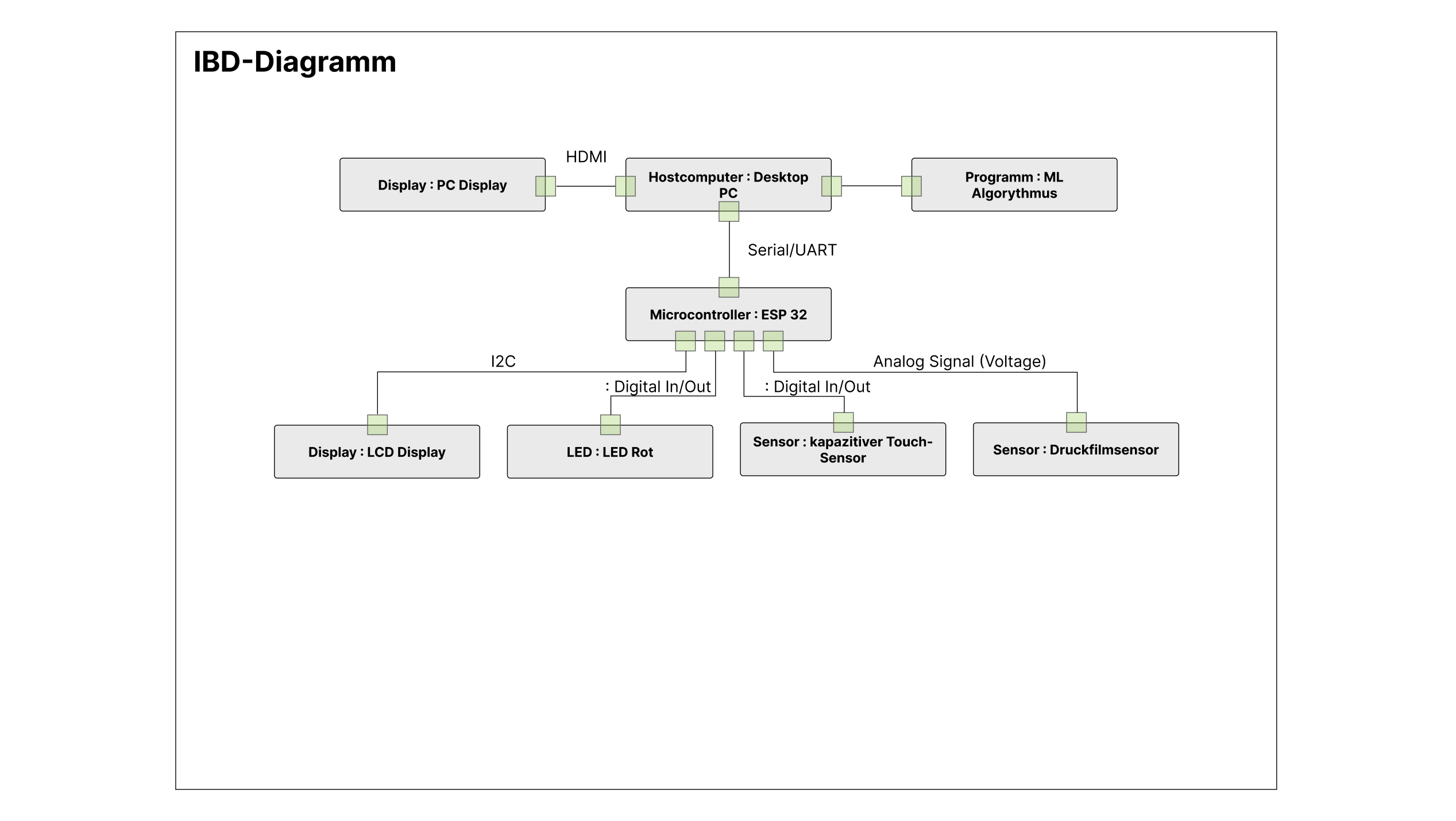
Development of a pen equipped with an integrated pressure sensor and an interface for data acquisition and visualization. Based on extensive training data, a time series classification model was developed, enhanced with context-based post-processing. The system demonstrates that surprisingly high reconstruction performance can be achieved even under highly constrained conditions.
Showroom




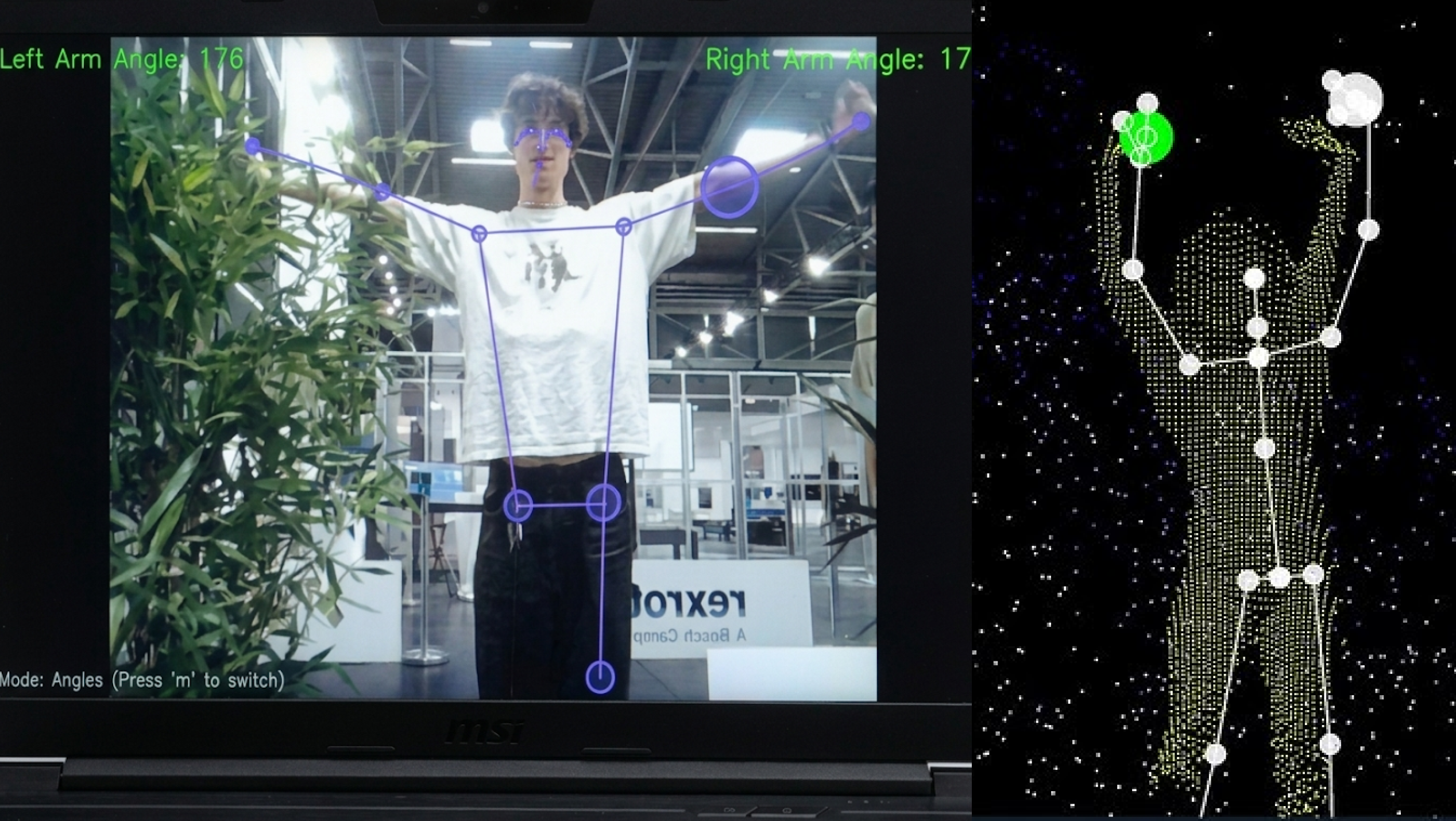
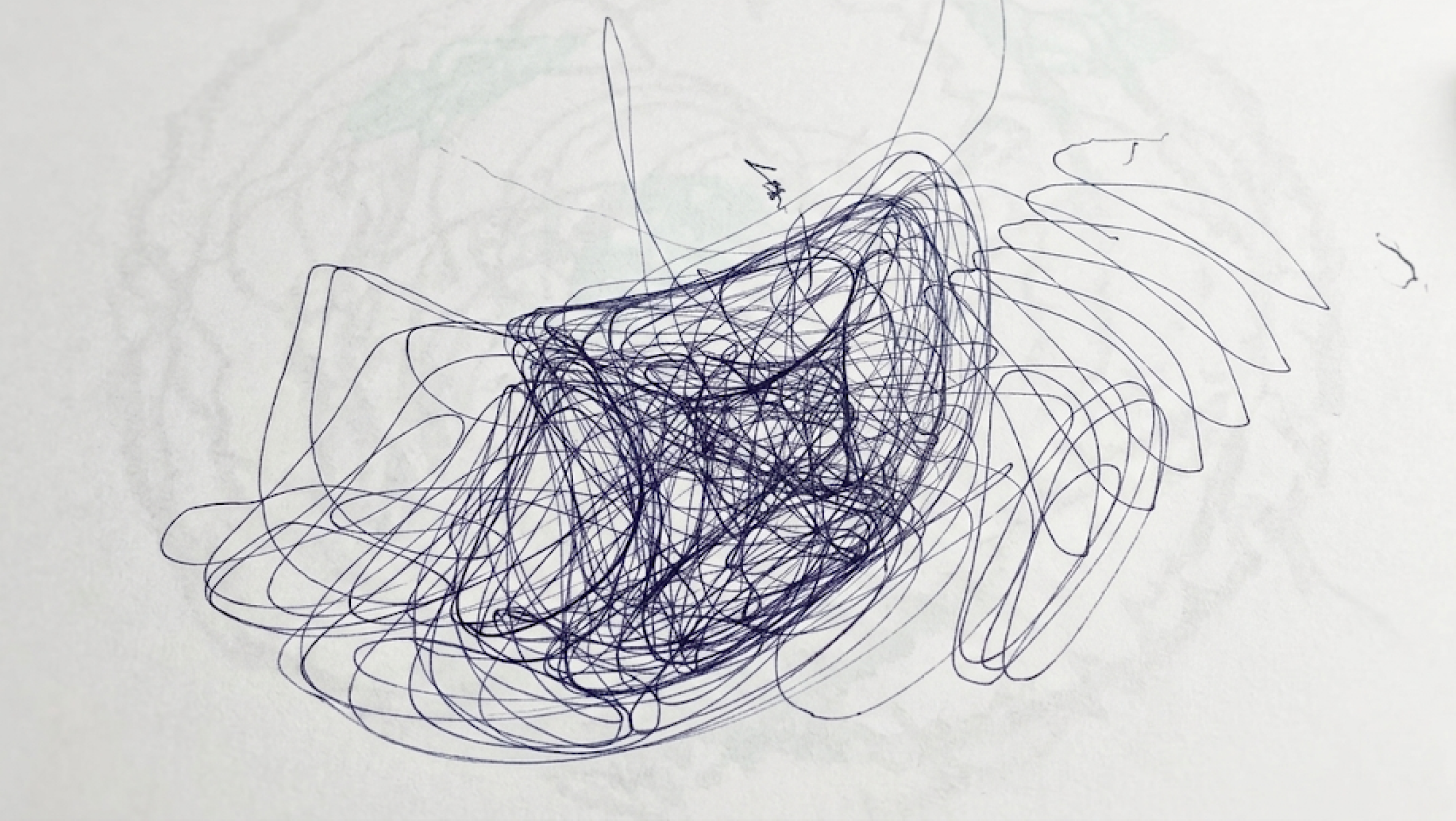
Body Mirroring

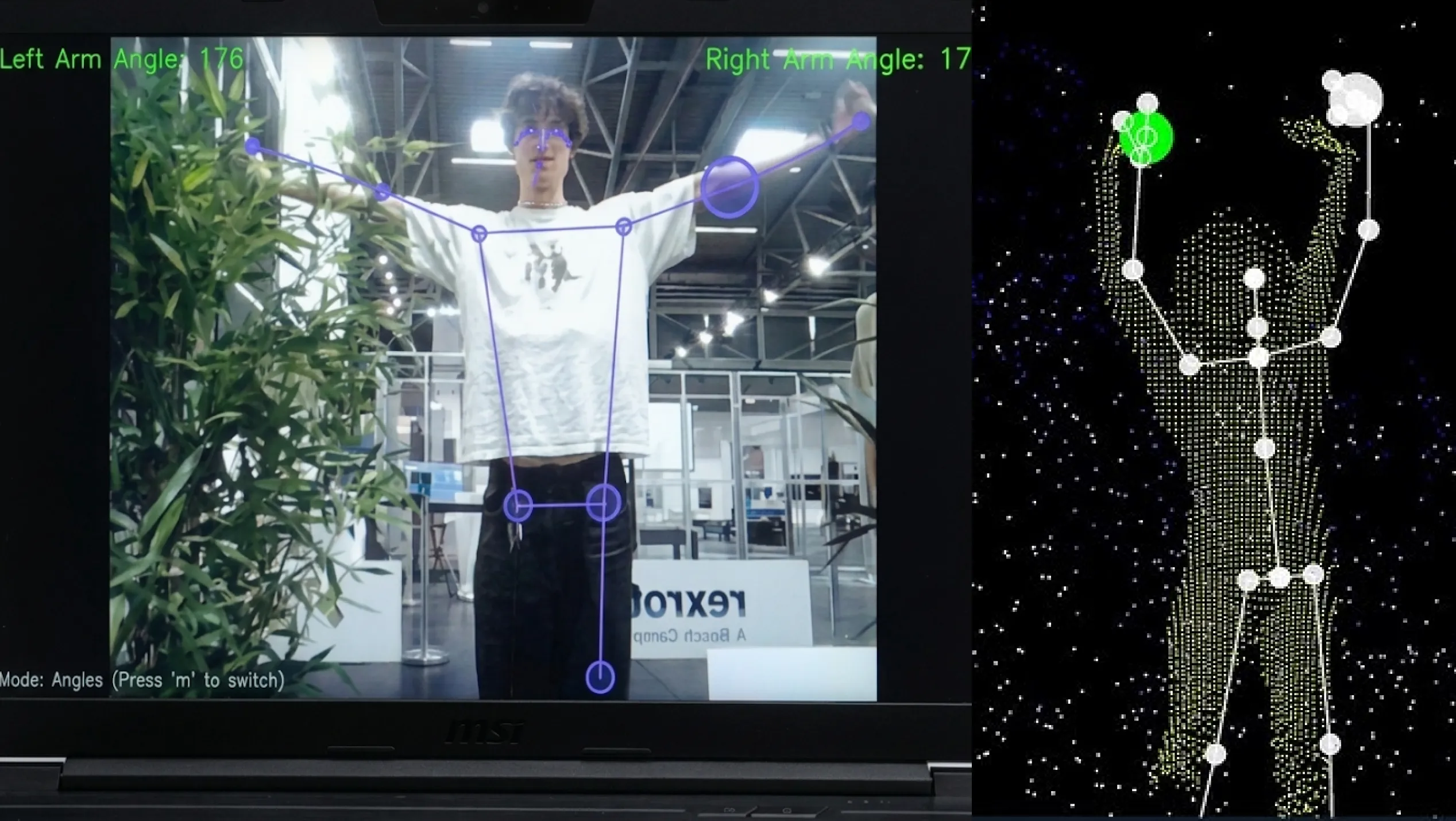
Interactive drawing machine with vision-based body tracking
Overview
Body Mirroring is an interactive art installation that captures body movements in real time and translates them into geometric drawings. The project was created as part of an exhibition format at the intersection of design and technology, where visitors themselves become active participants in the image generation process.
Challenge
The goal was to develop a system that combines technical complexity (computer vision, motion transfer, mechanics) with intuitive and direct interaction. This required both robust motion detection and a clear, understandable visual translation of movement.
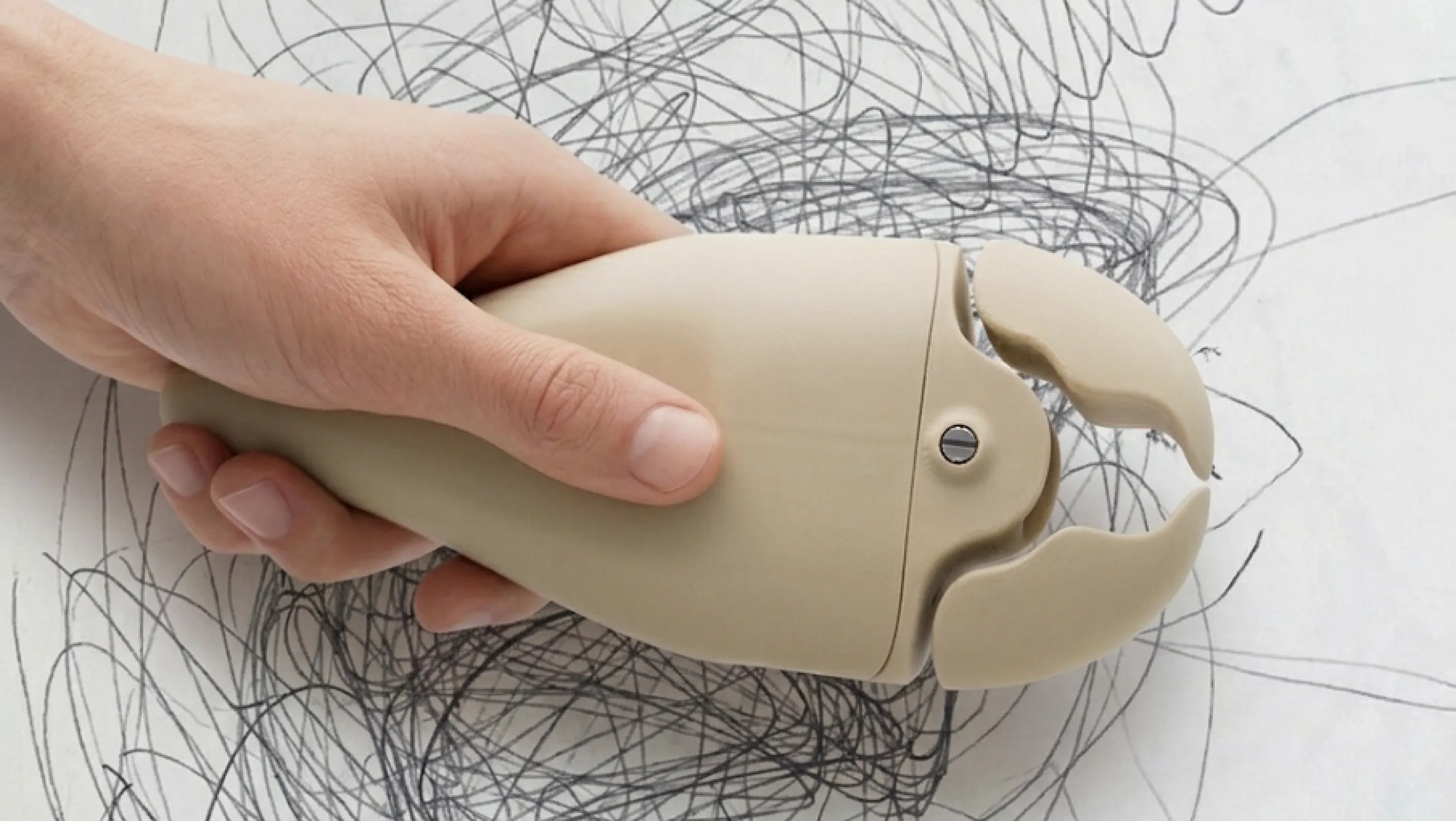
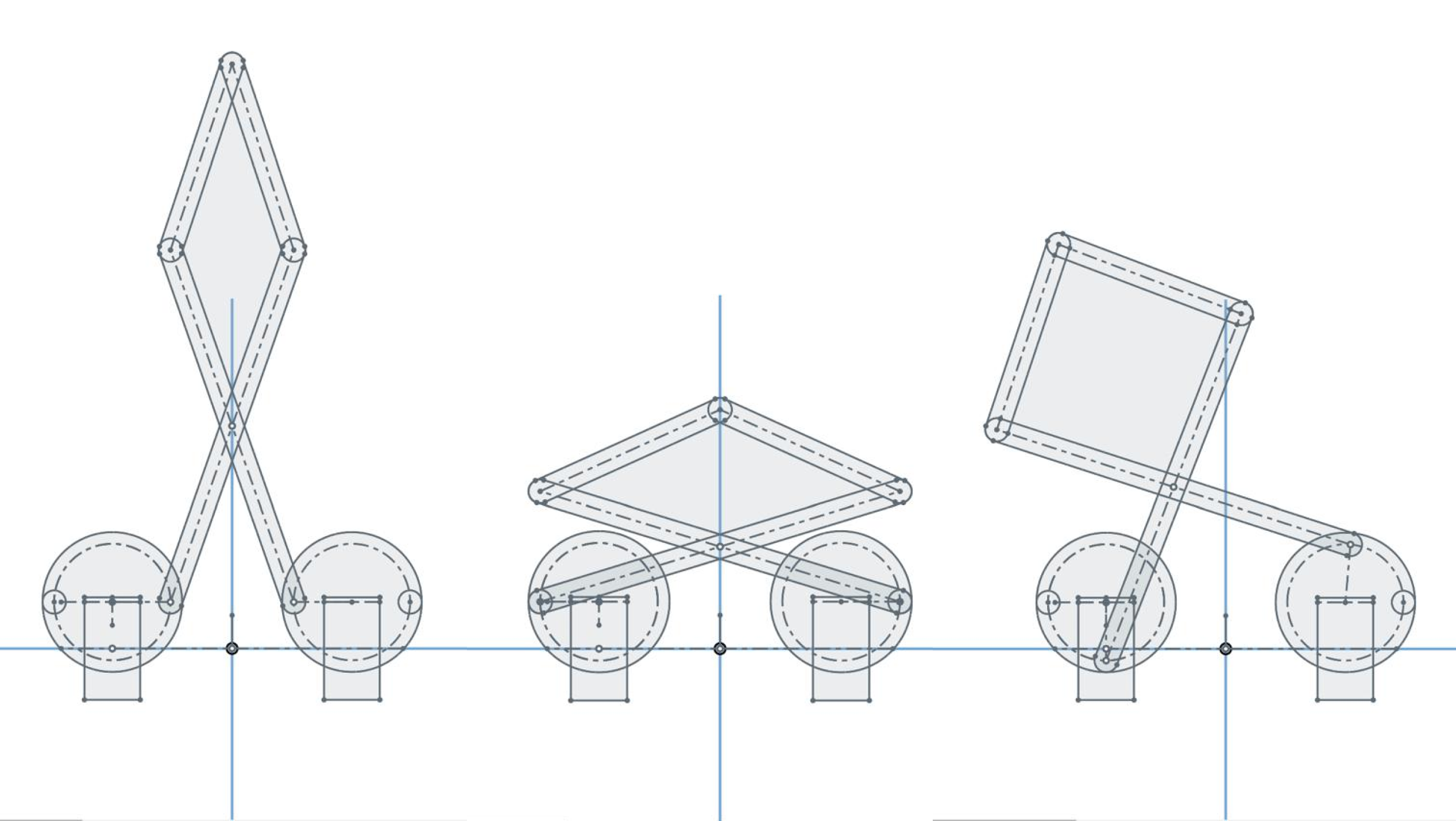
Concept & Implementation
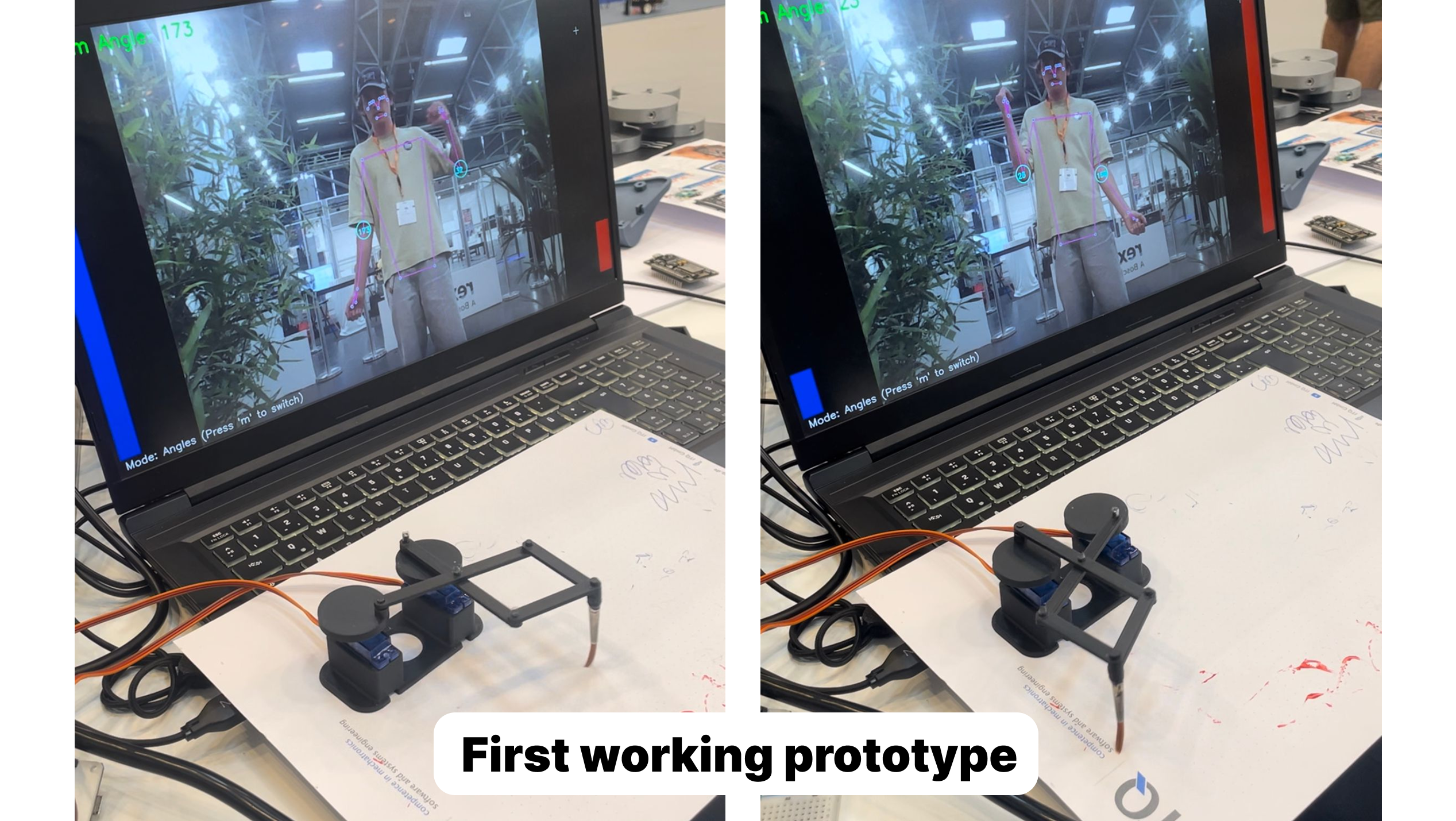
Development of a system consisting of webcam-based body tracking (computer vision) and a mechatronic drawing machine. The movements of the left and right sides of the body are interpreted in real time and mapped to two motor axes, which generate geometric shapes via a scissor mechanism. The iterative design process included form studies, prototyping, and usability testing to optimize both functionality and the overall exhibition experience.
Showroom

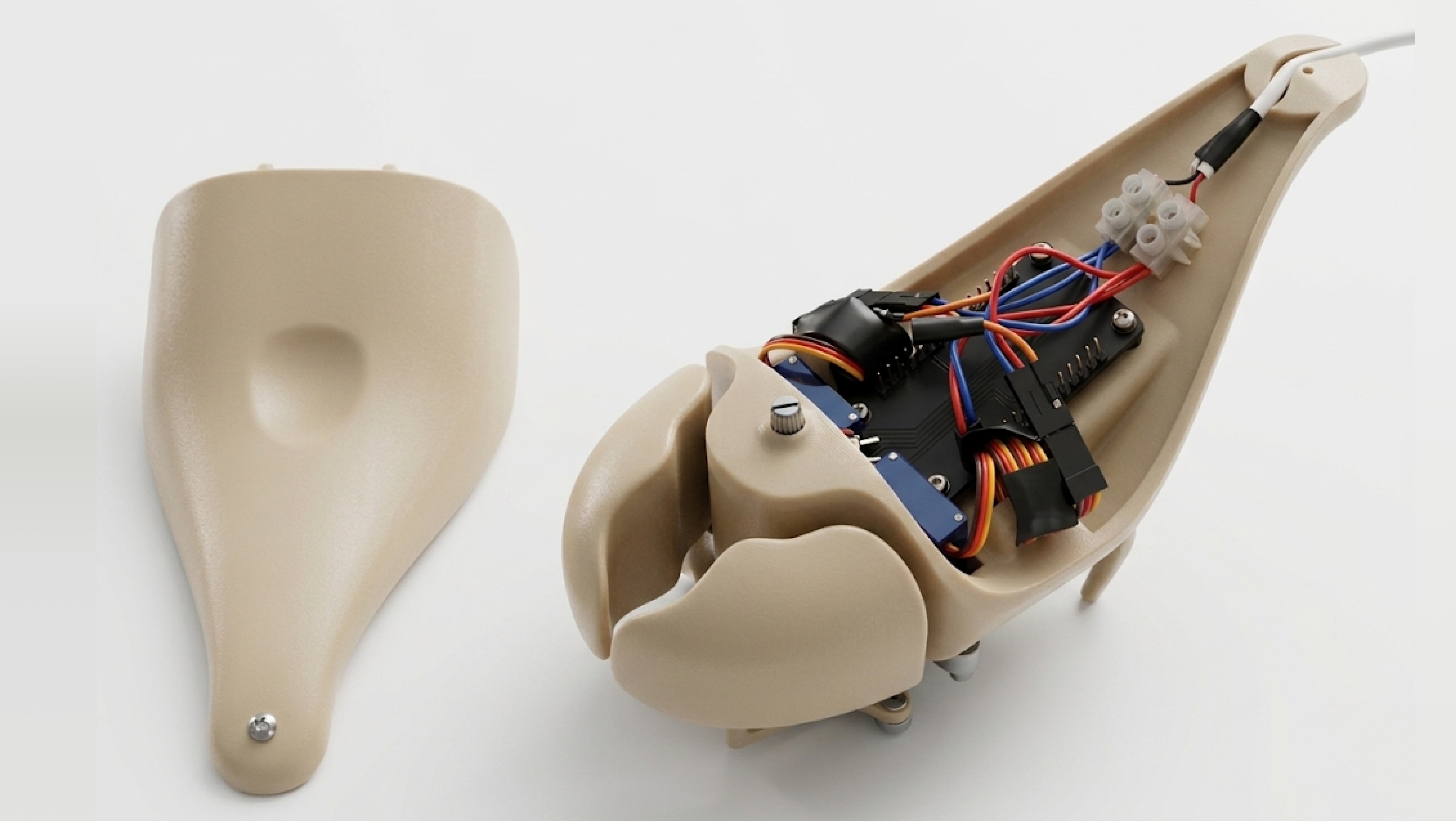


Scoopy

Modular robot for human-machine interaction
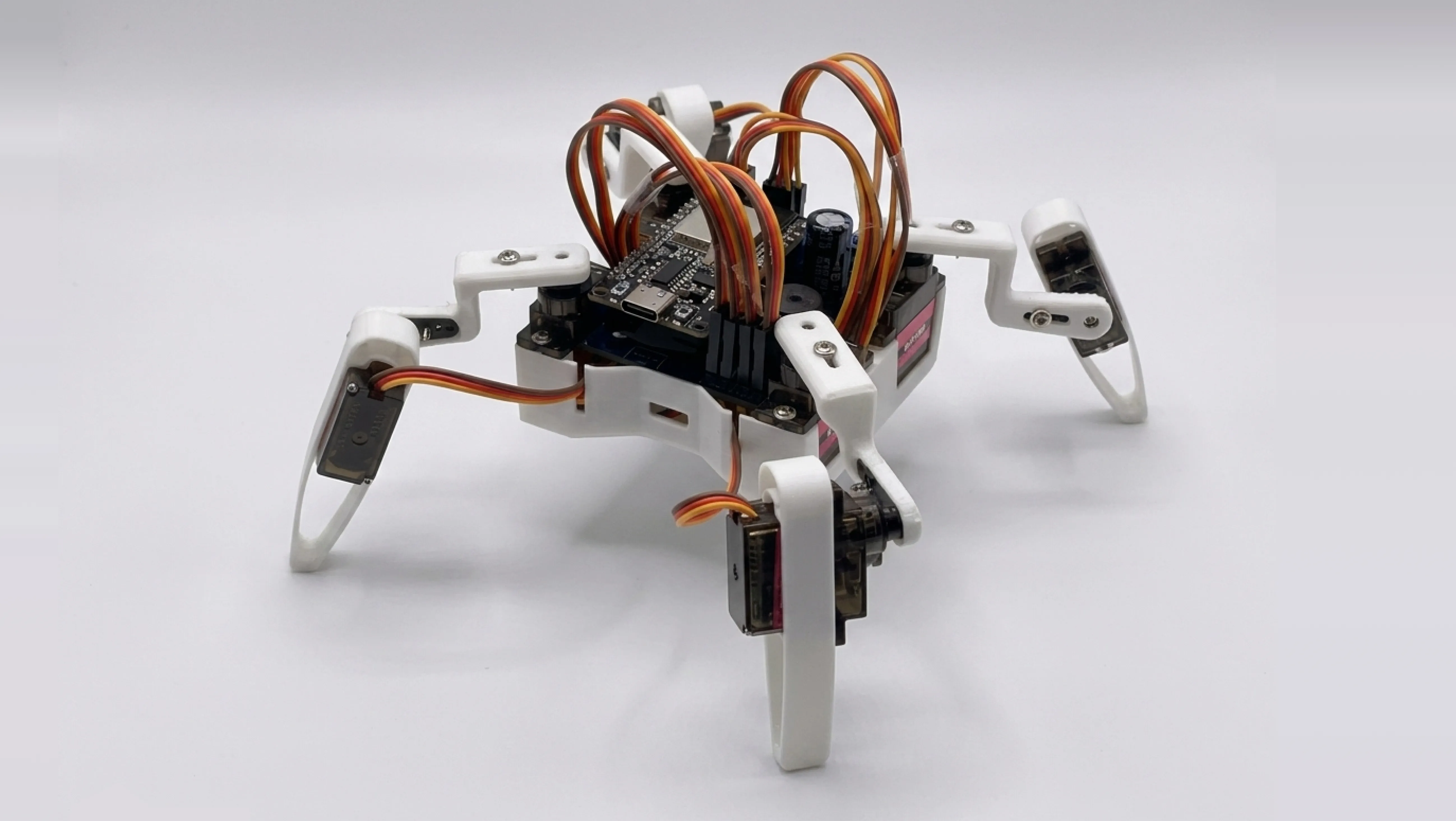
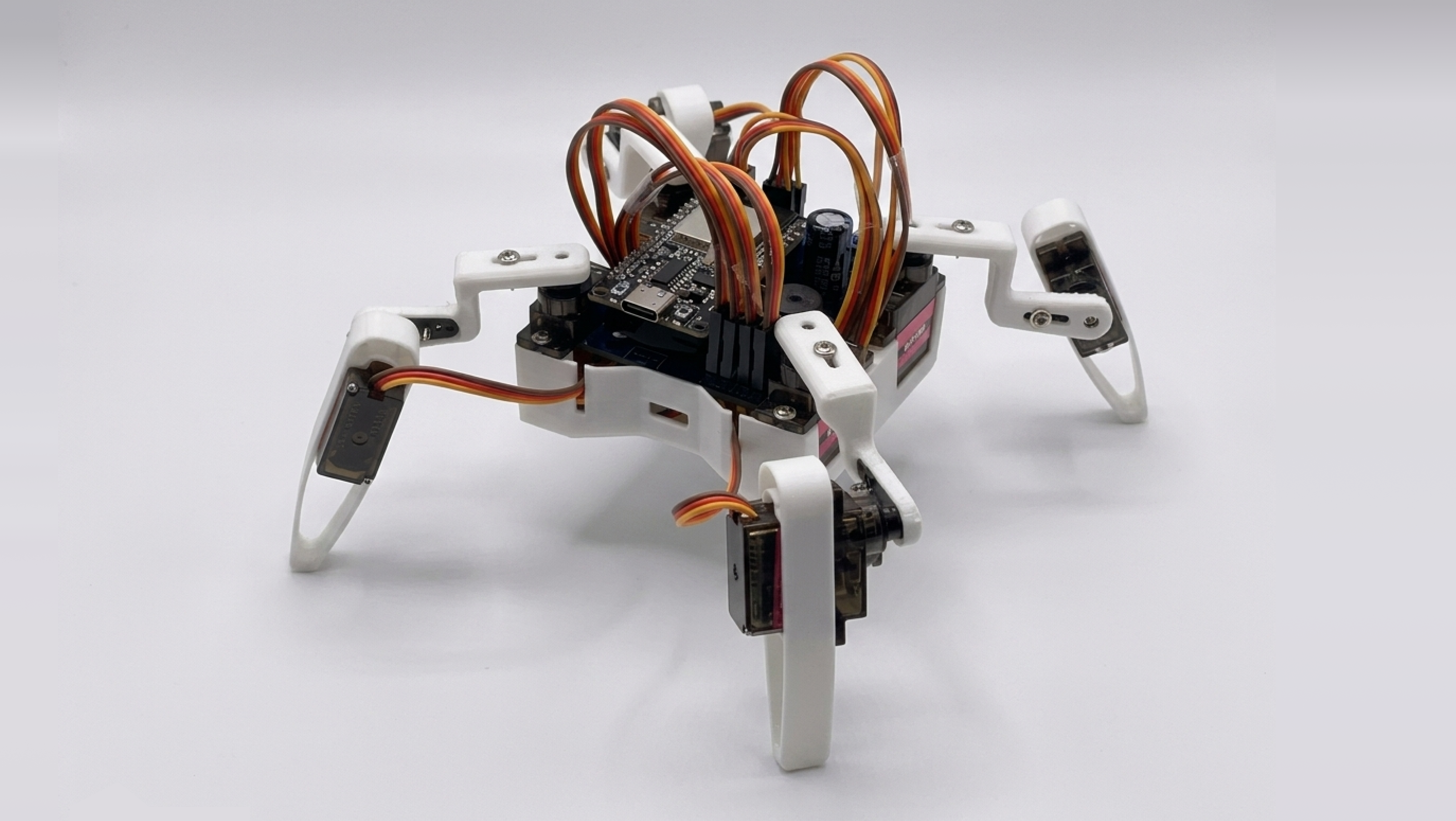
Overview
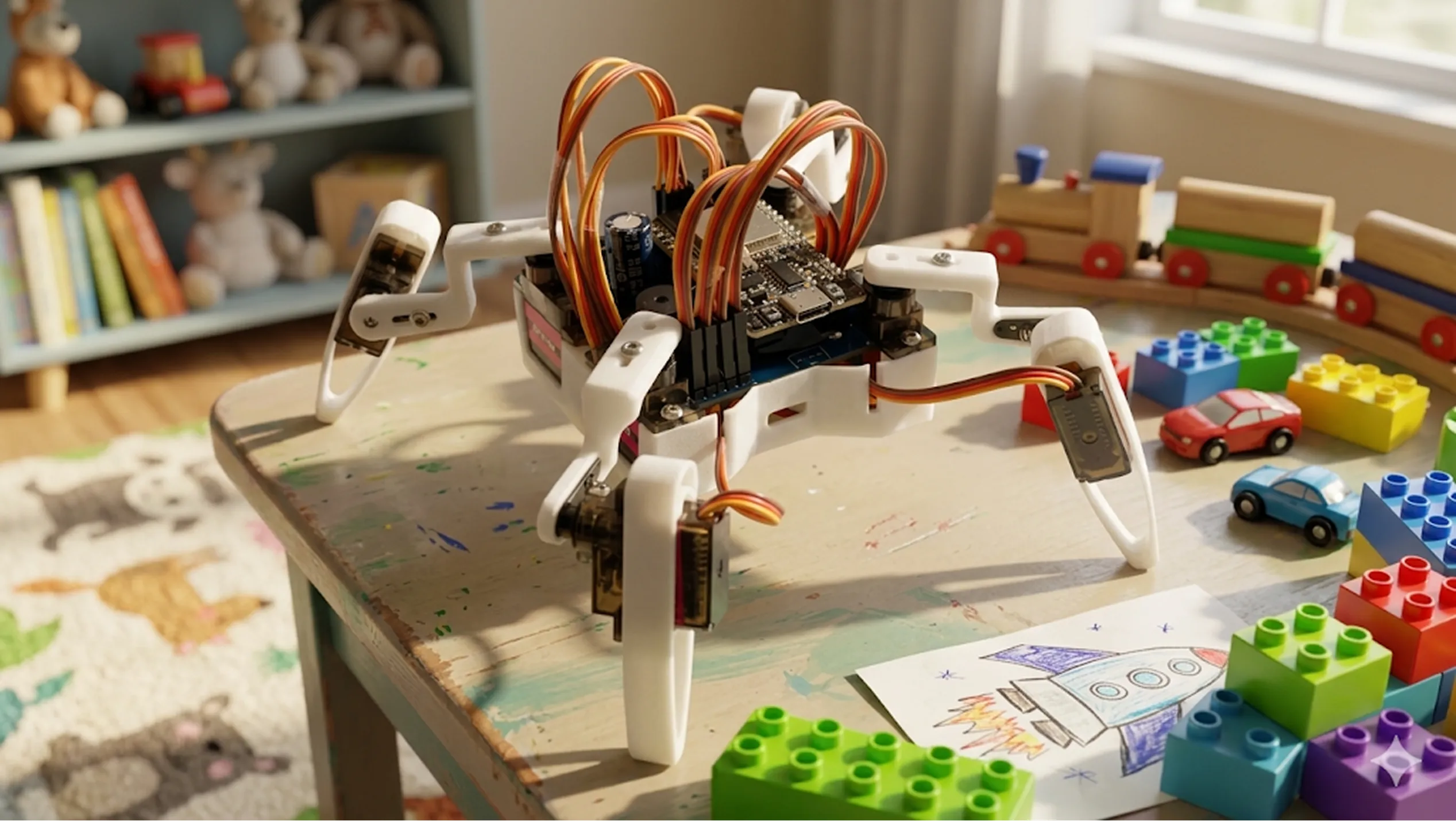
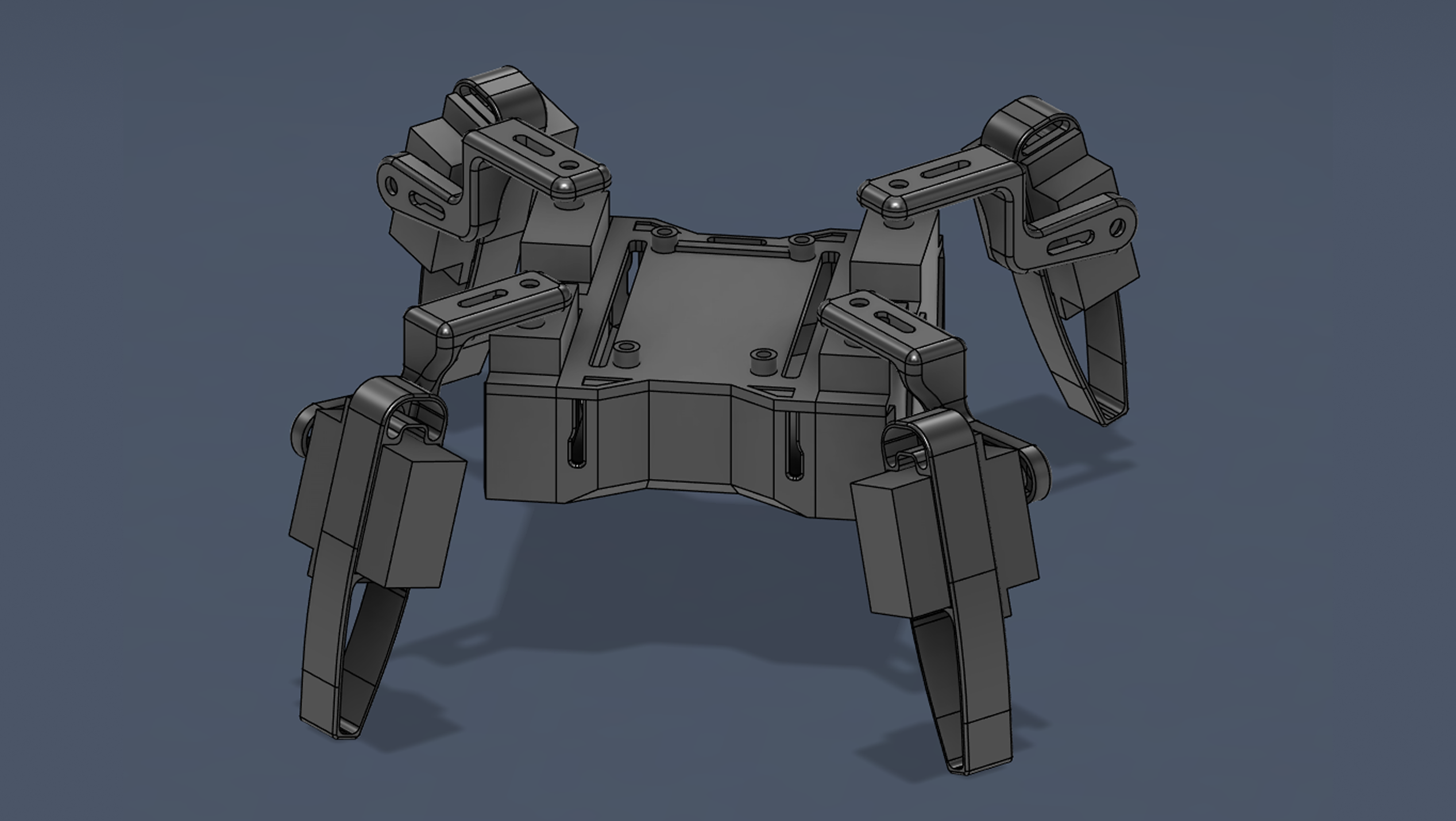
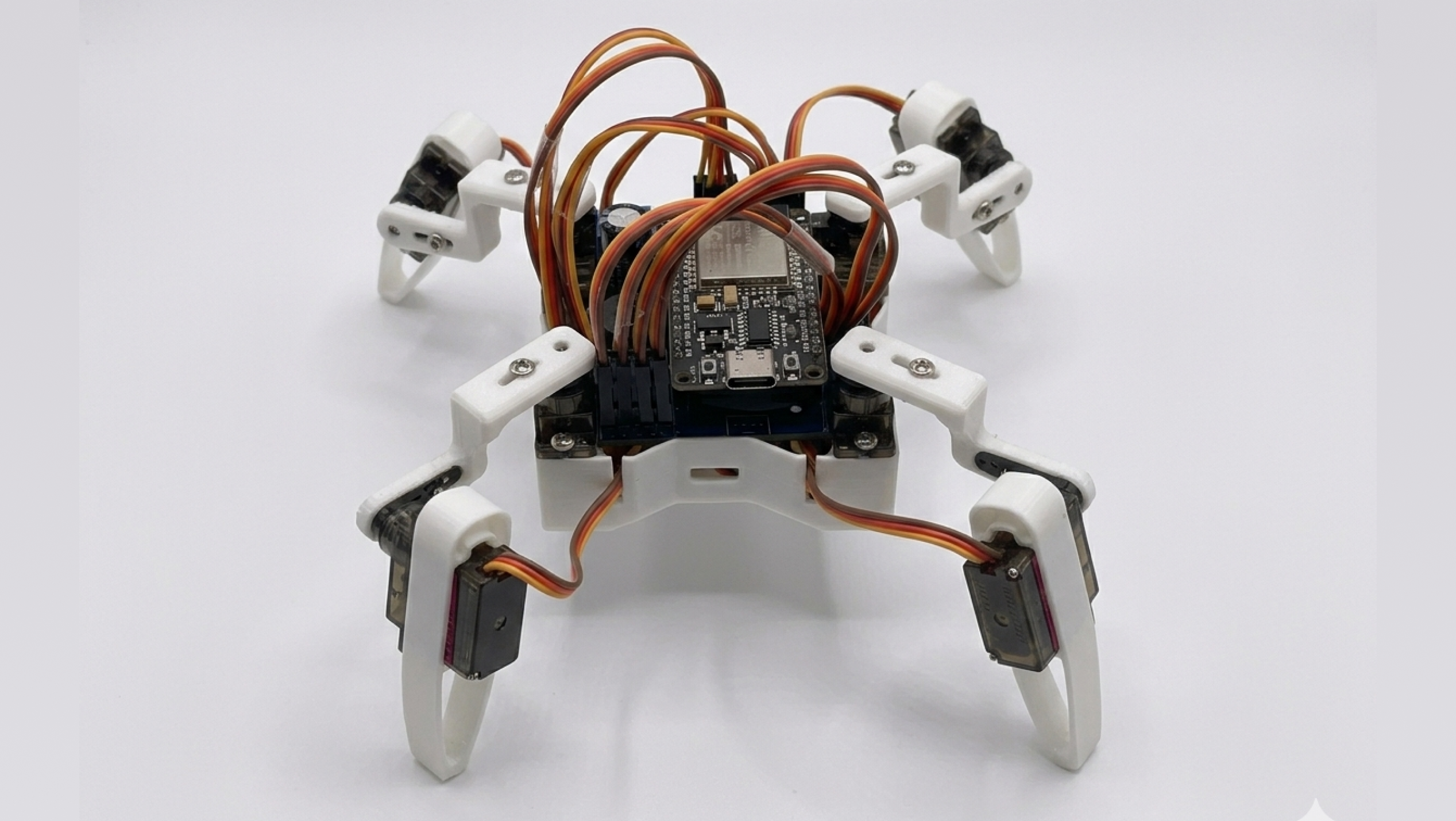
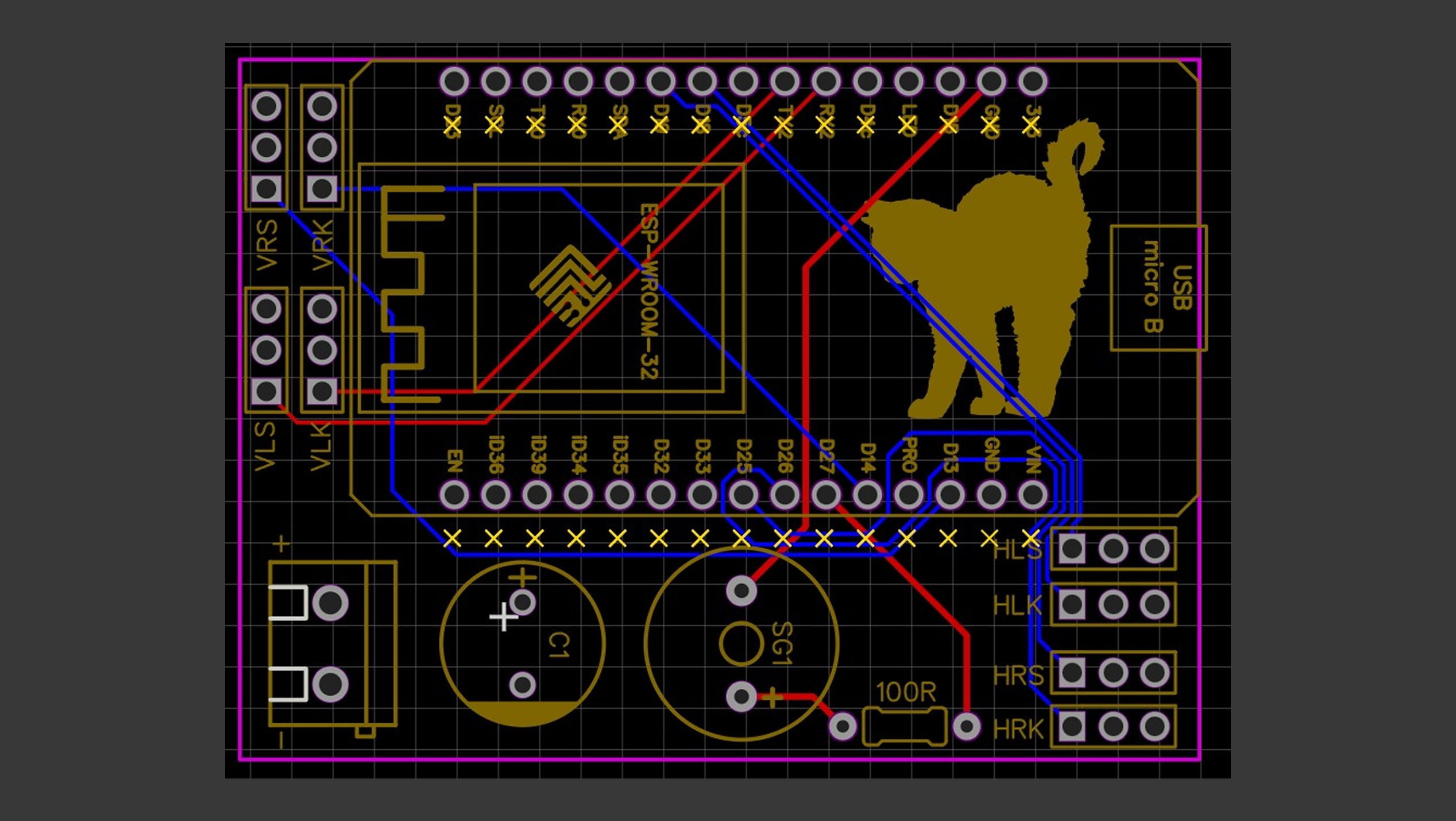
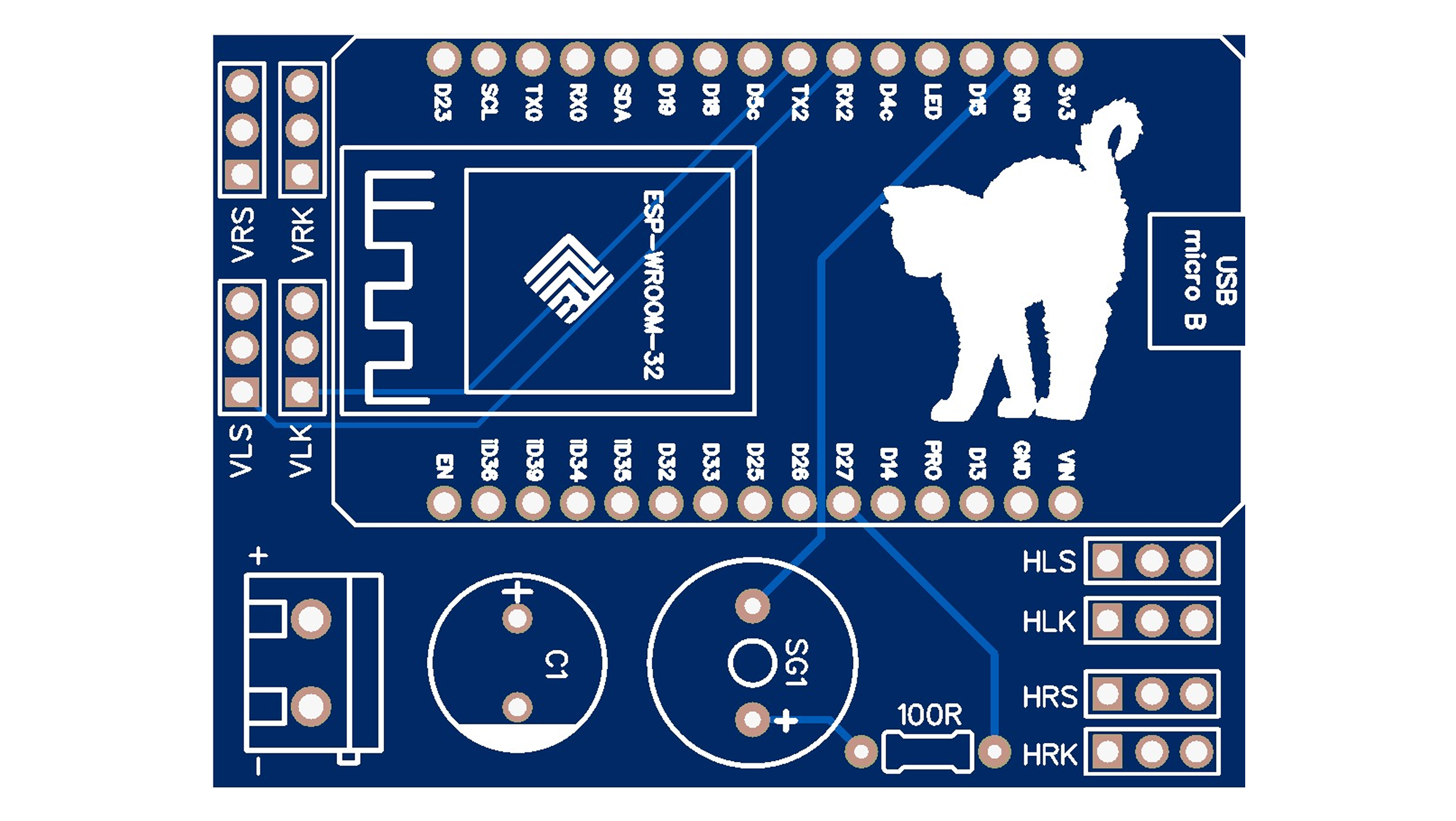
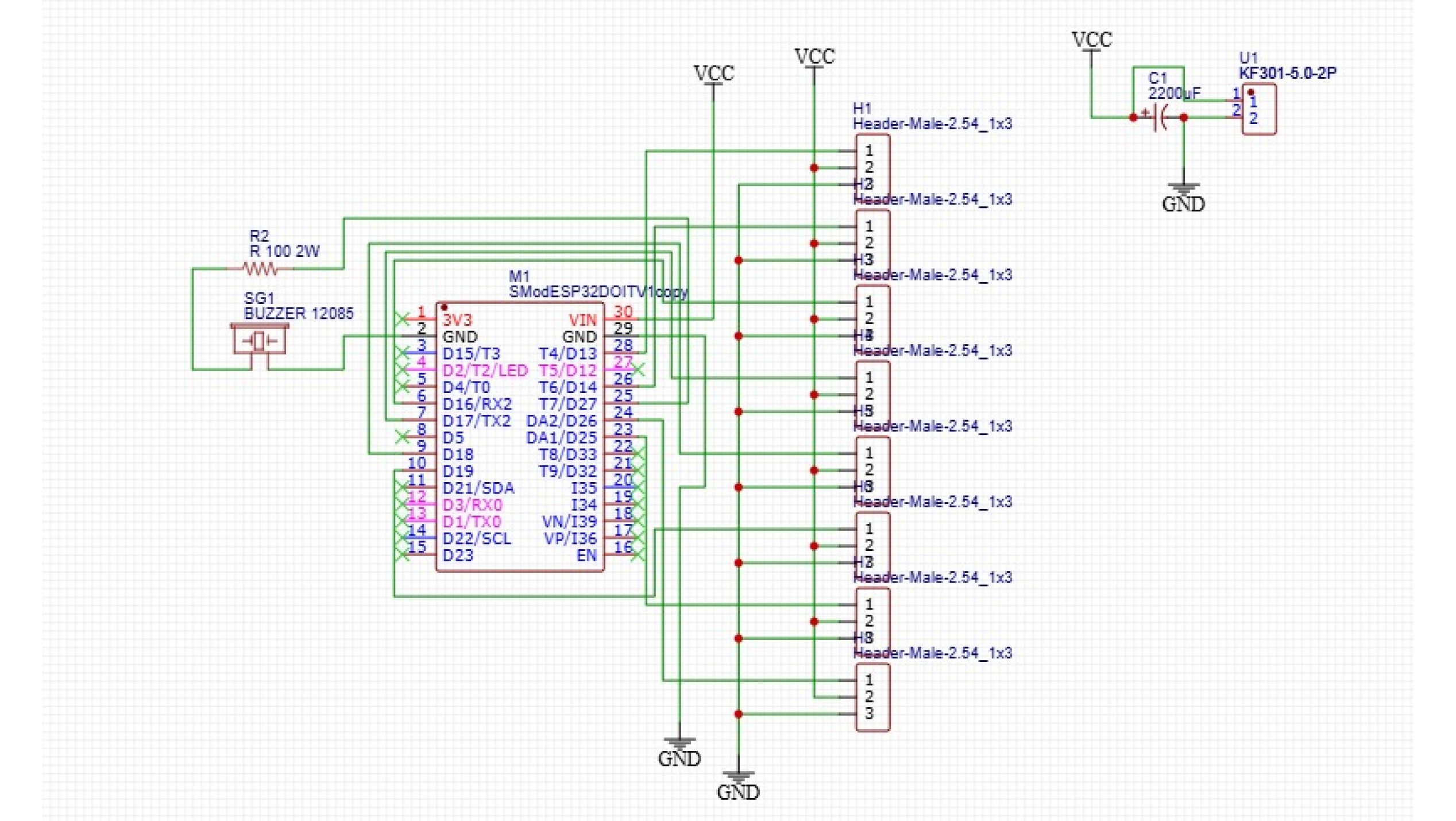
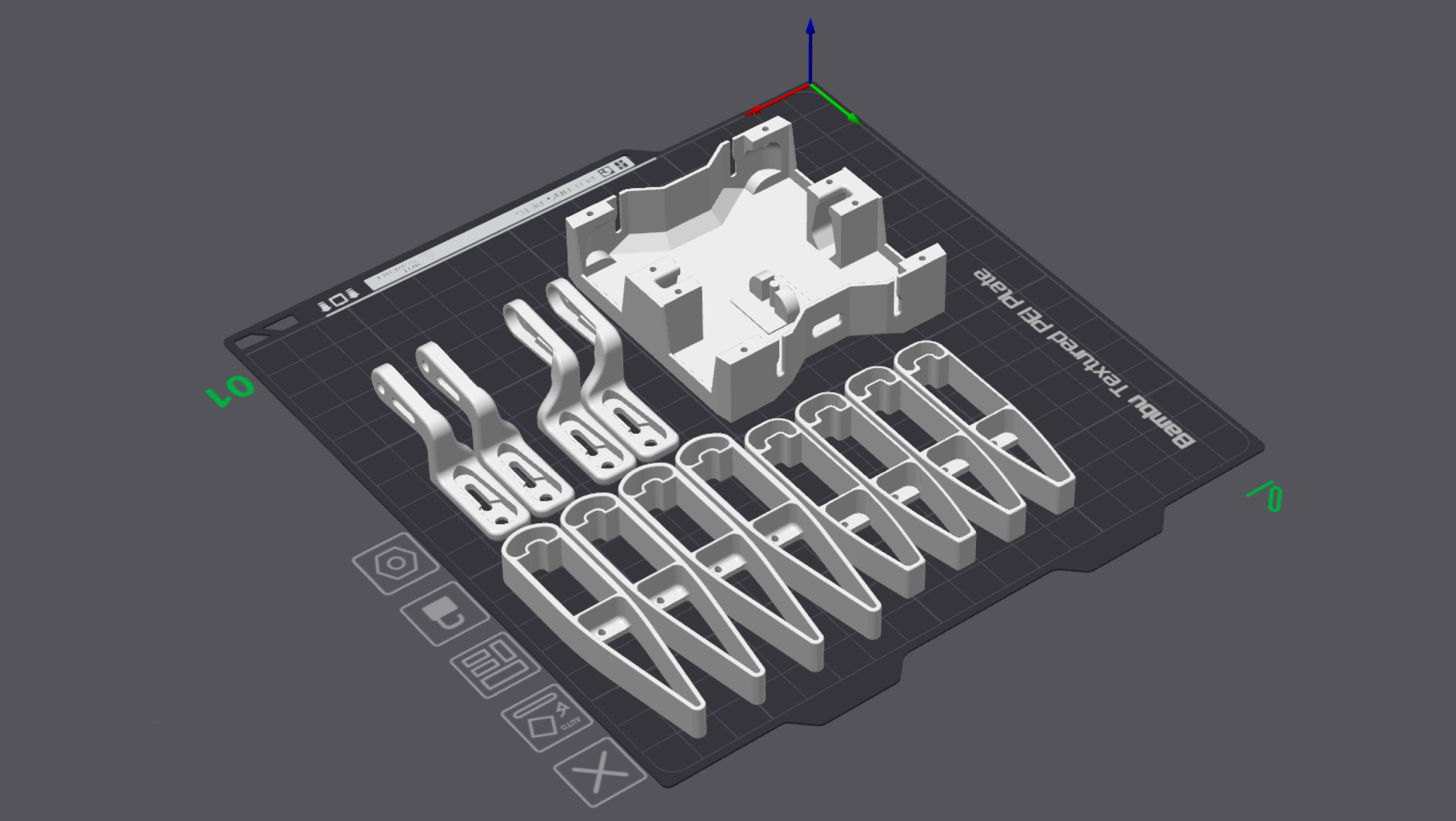
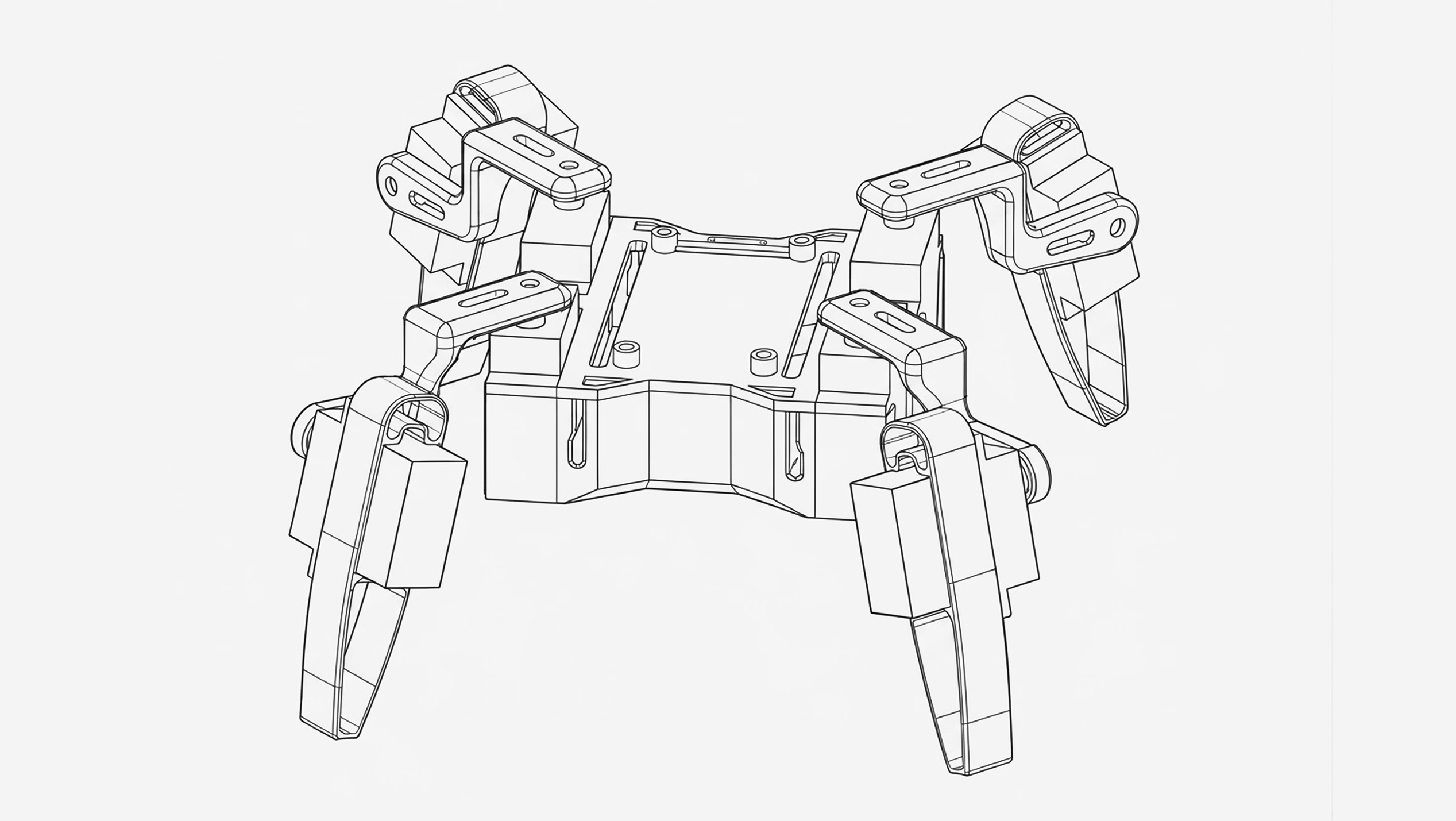
Scoopy is a servo-driven, four-legged robot with its own controller and Wi-Fi connectivity. As part of a study project, it was developed as an experimental system that combines functional locomotion with accessible, interactive design.
Challenge
In addition to the technical implementation of a walking robot, the goal was to systematically investigate and reduce barriers to entry in robotics. This required a thoughtful combination of functional movement and trust-building behavior.
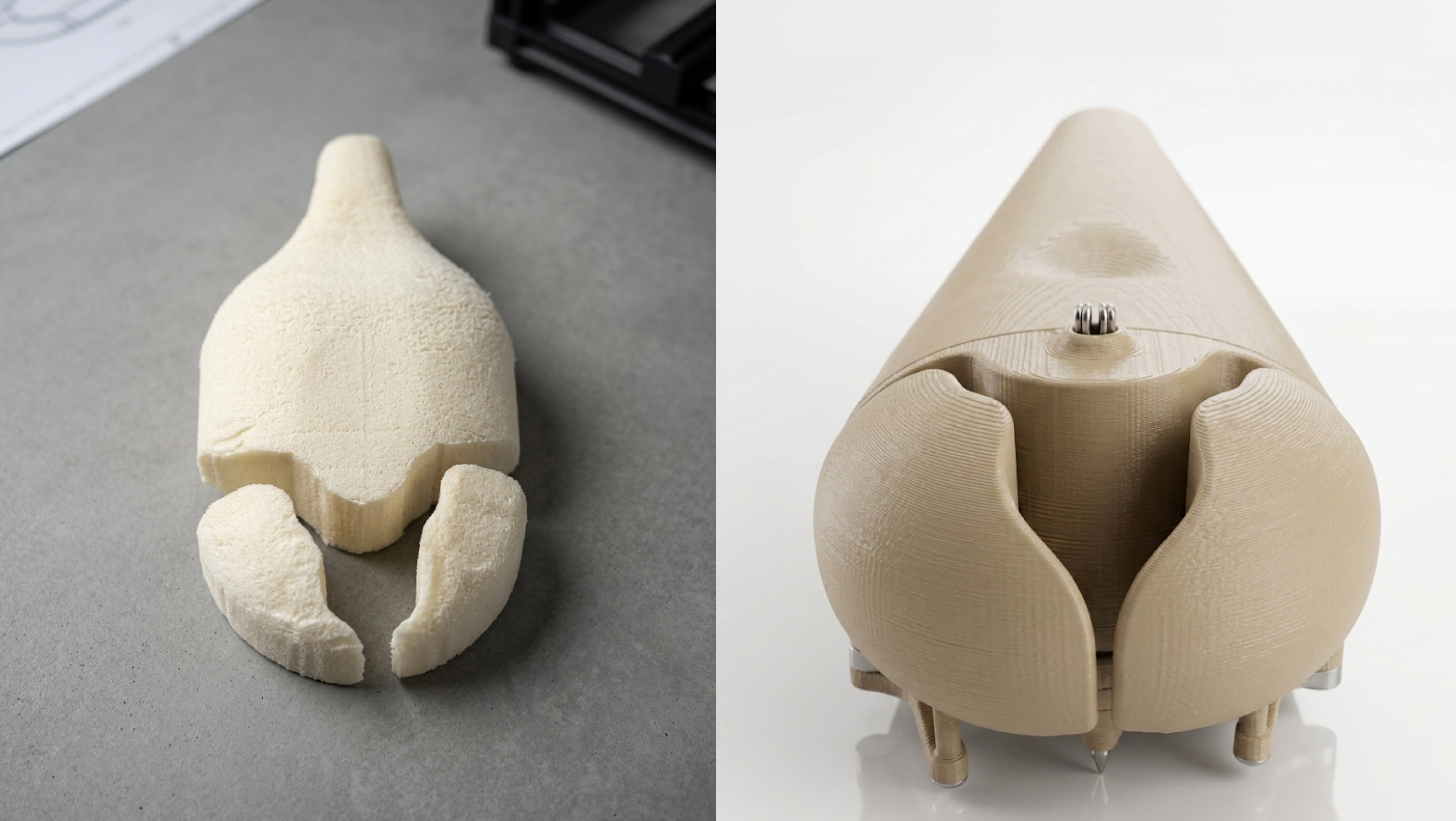
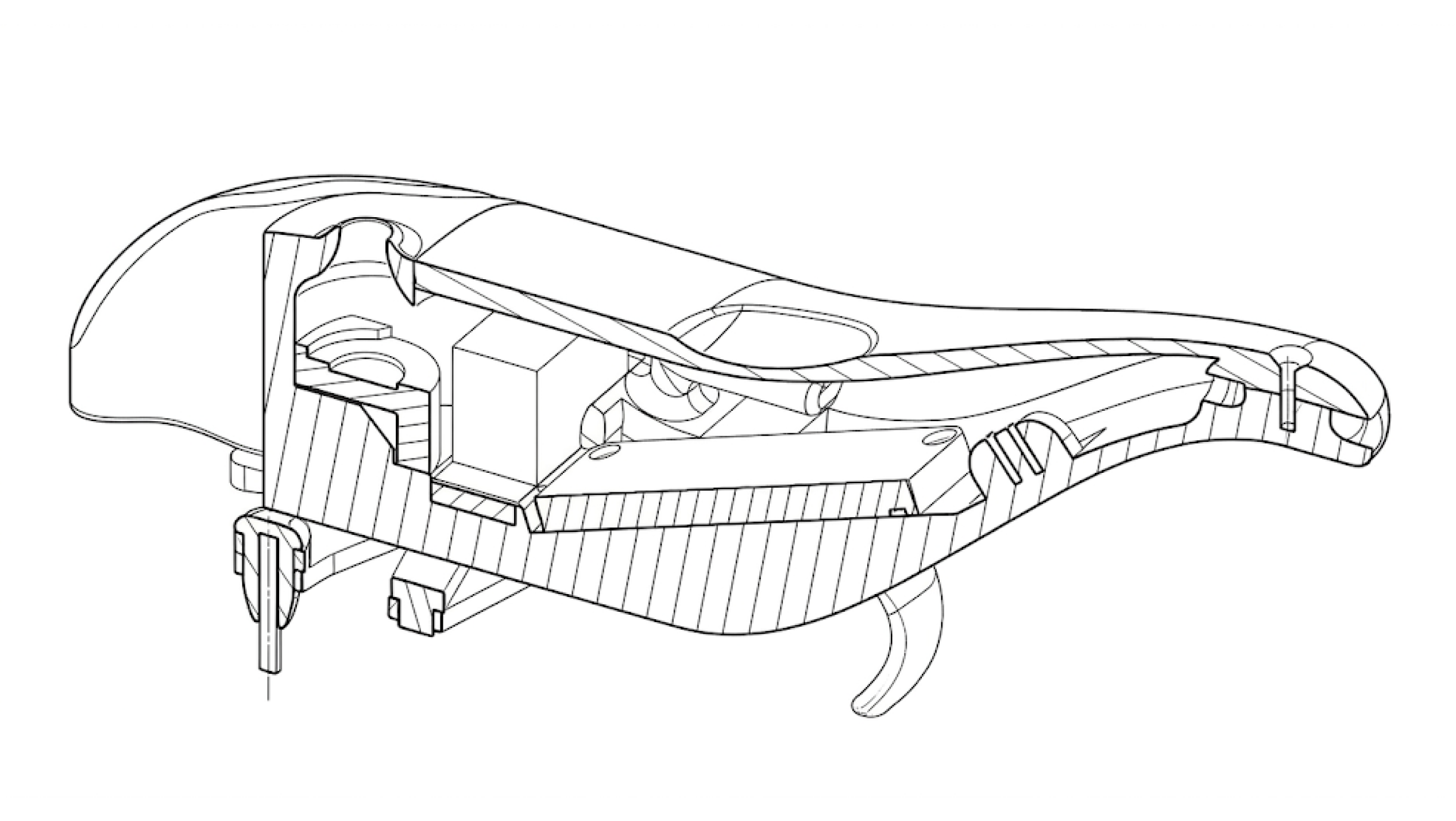
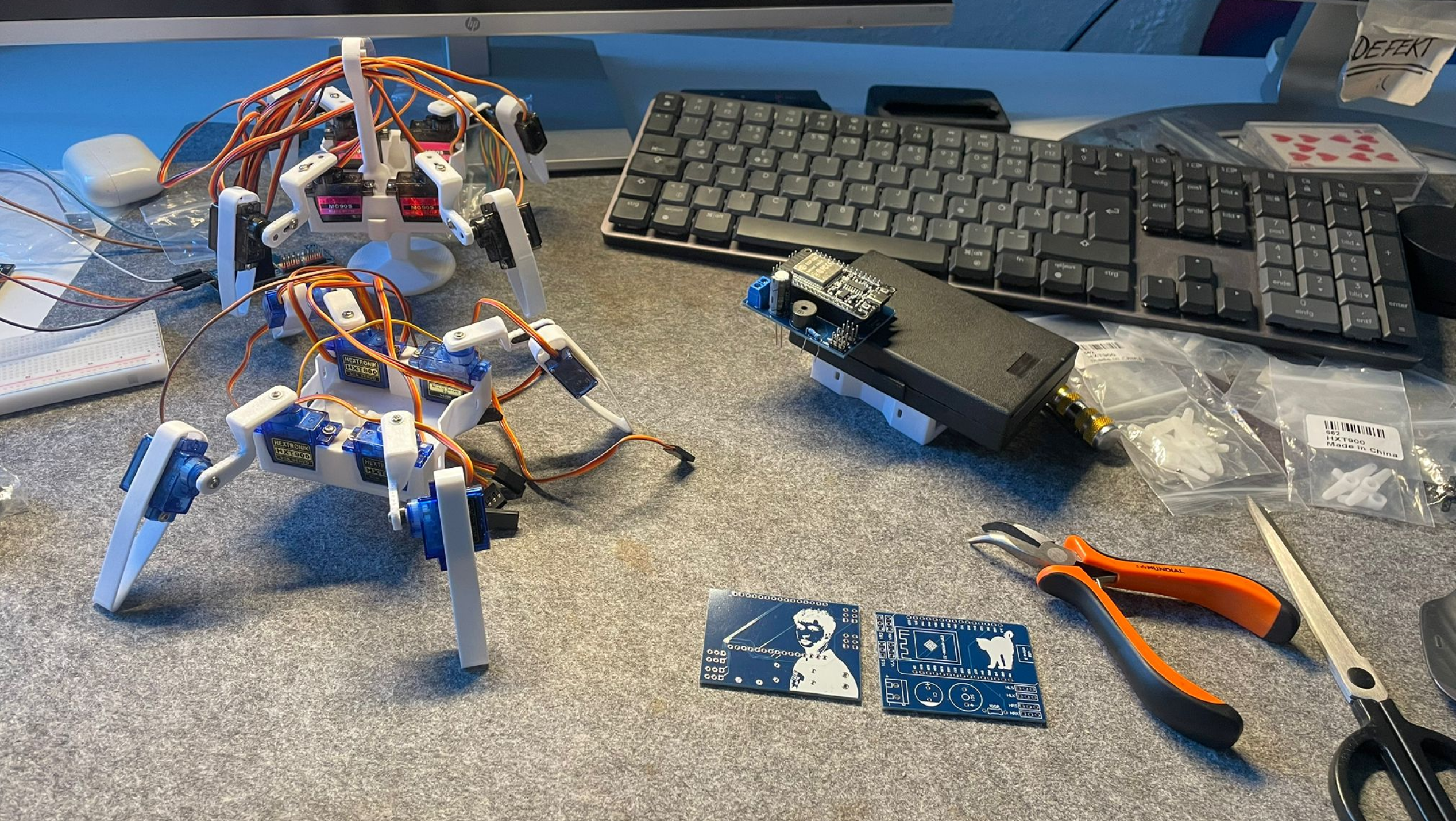
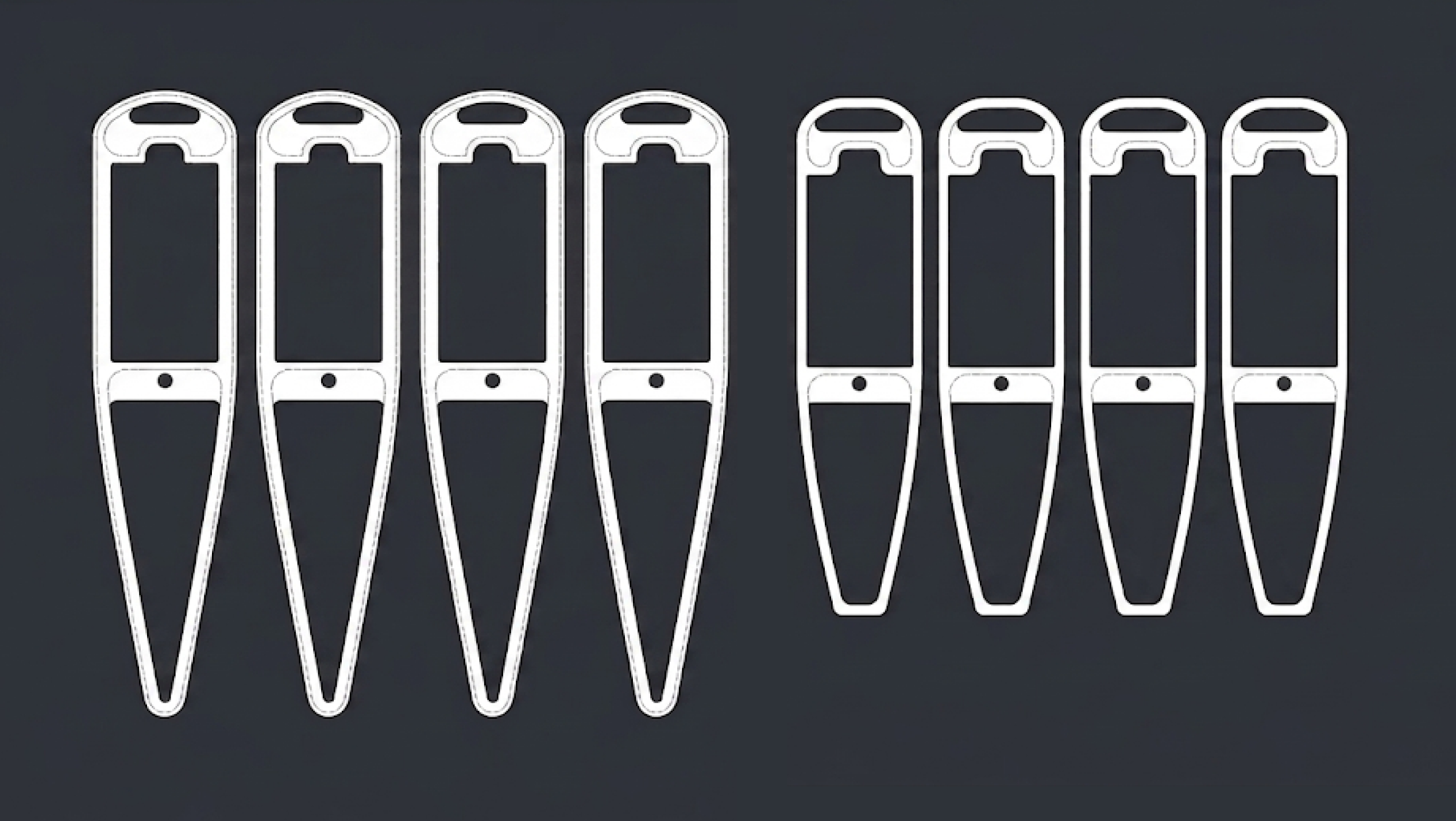
Concept & Implementation
Development of a modular robot system including CAD design, custom PCB design, and controller programming. Through a behavior design approach, movements, gestures, and sounds are are intentionally used to make interaction intuitive and to build trust in the system.
Showroom


Haptophone


Interactive installation translating vibrations into visual and auditory experiences
Overview
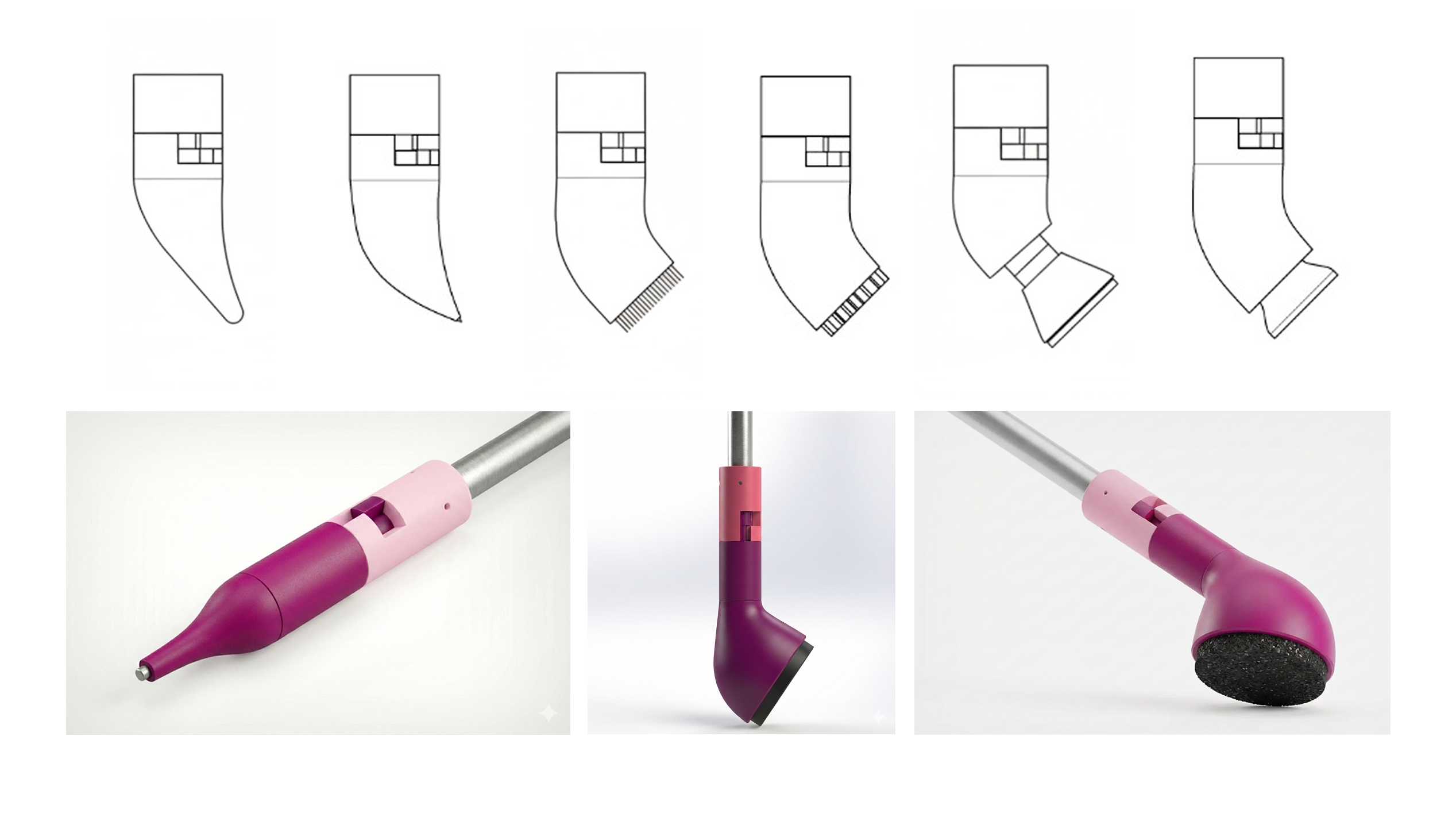
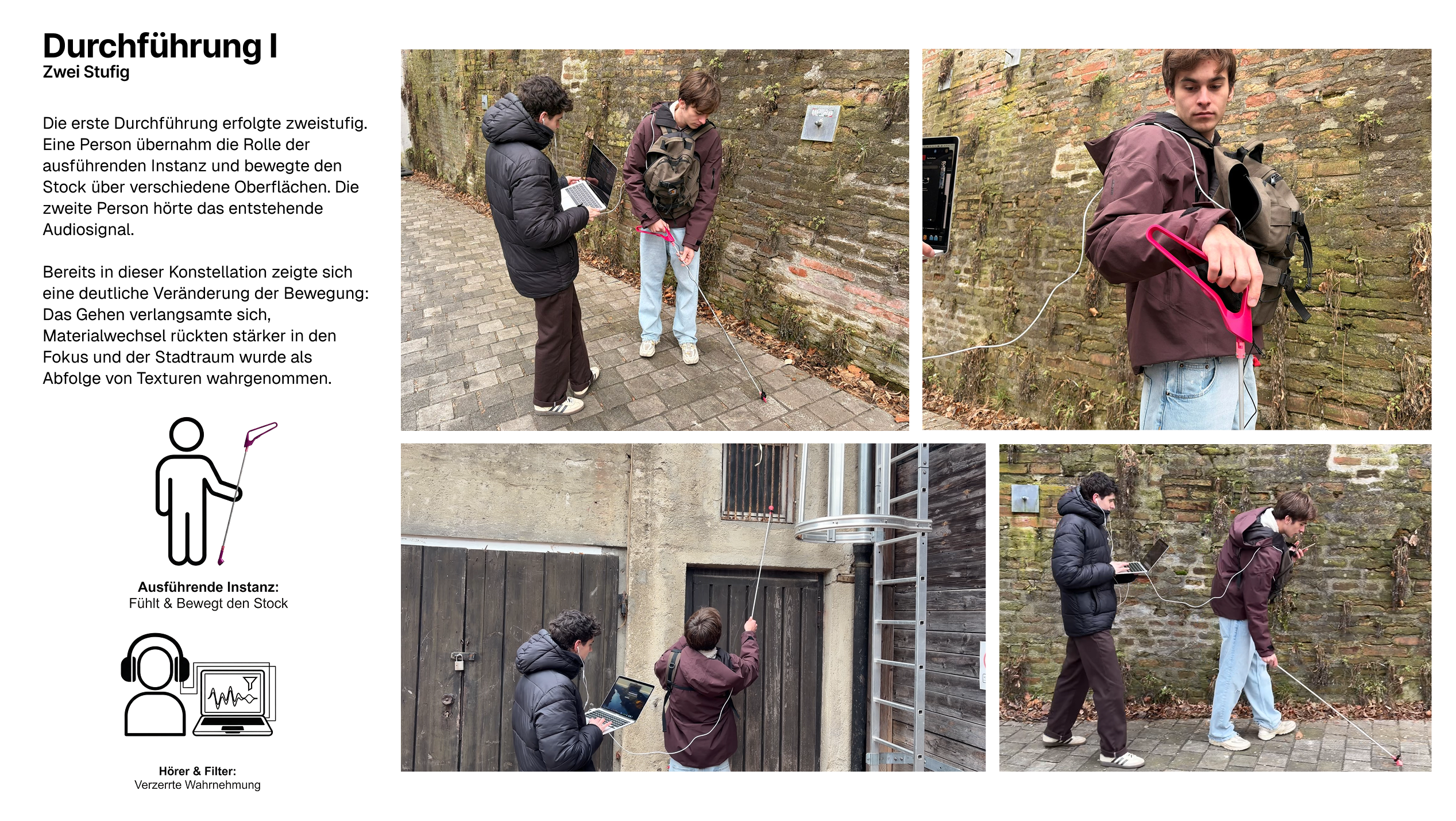
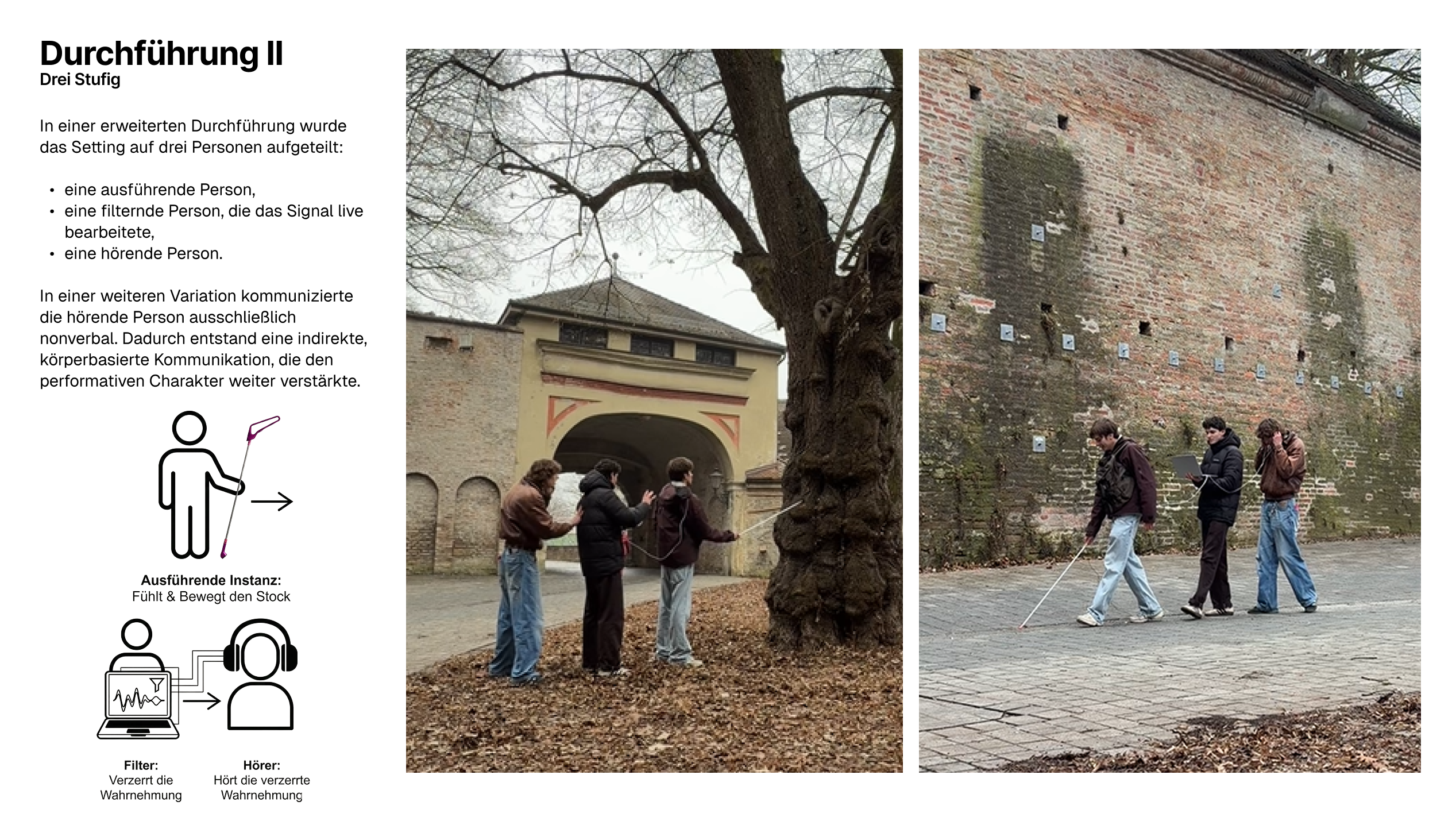
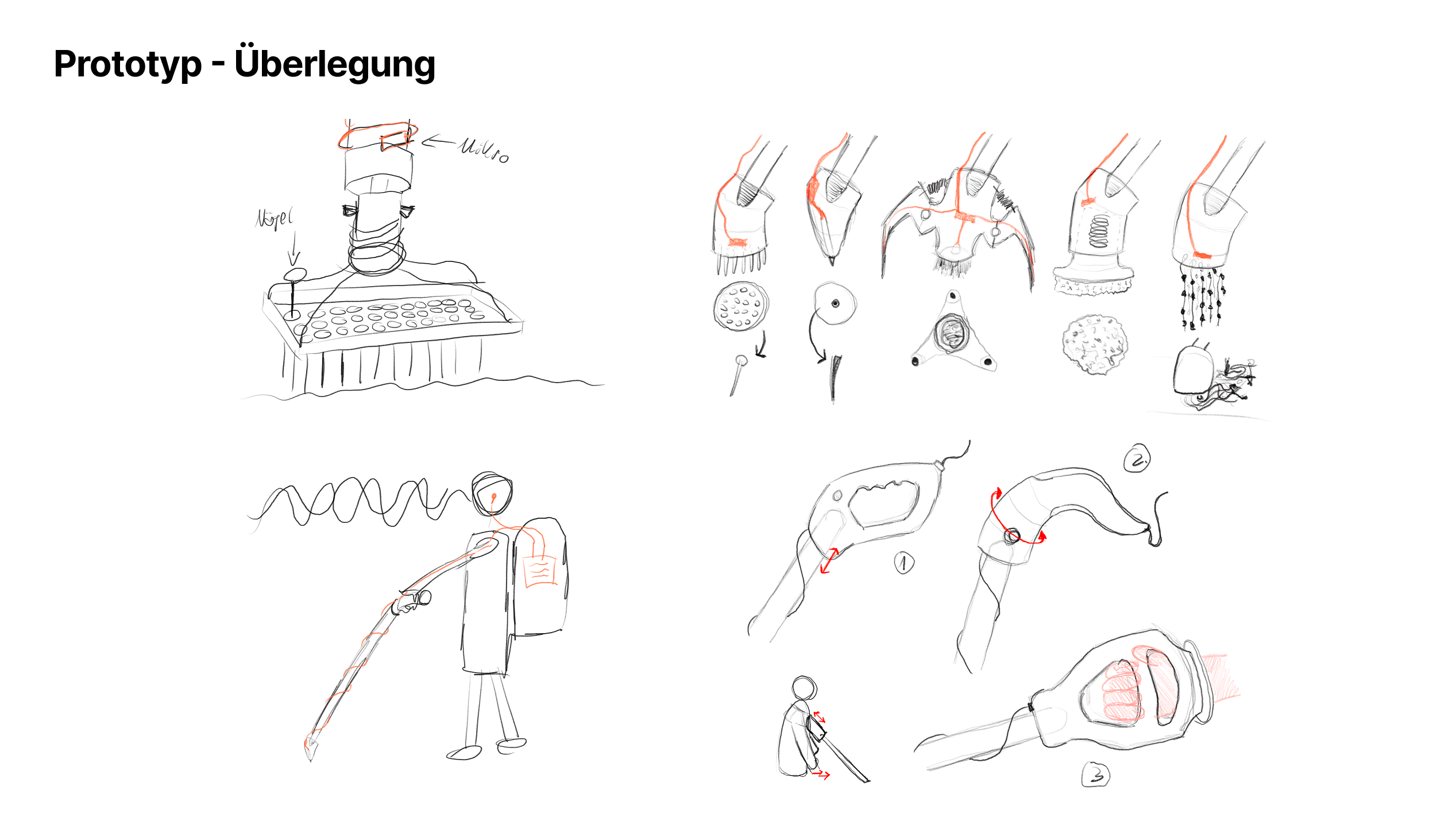
Haptophone is an experimental, modular tool for the artistic exploration of surfaces and spaces. Through movement, sound, and real-time visualization, a multisensory experience emerges between the physical and digital space.
Challenge
The challenge was to combine technical systems and intuitive interaction. Particularly important was a playful approach that remains open and directly accessible despite complex audio and visualization processes.
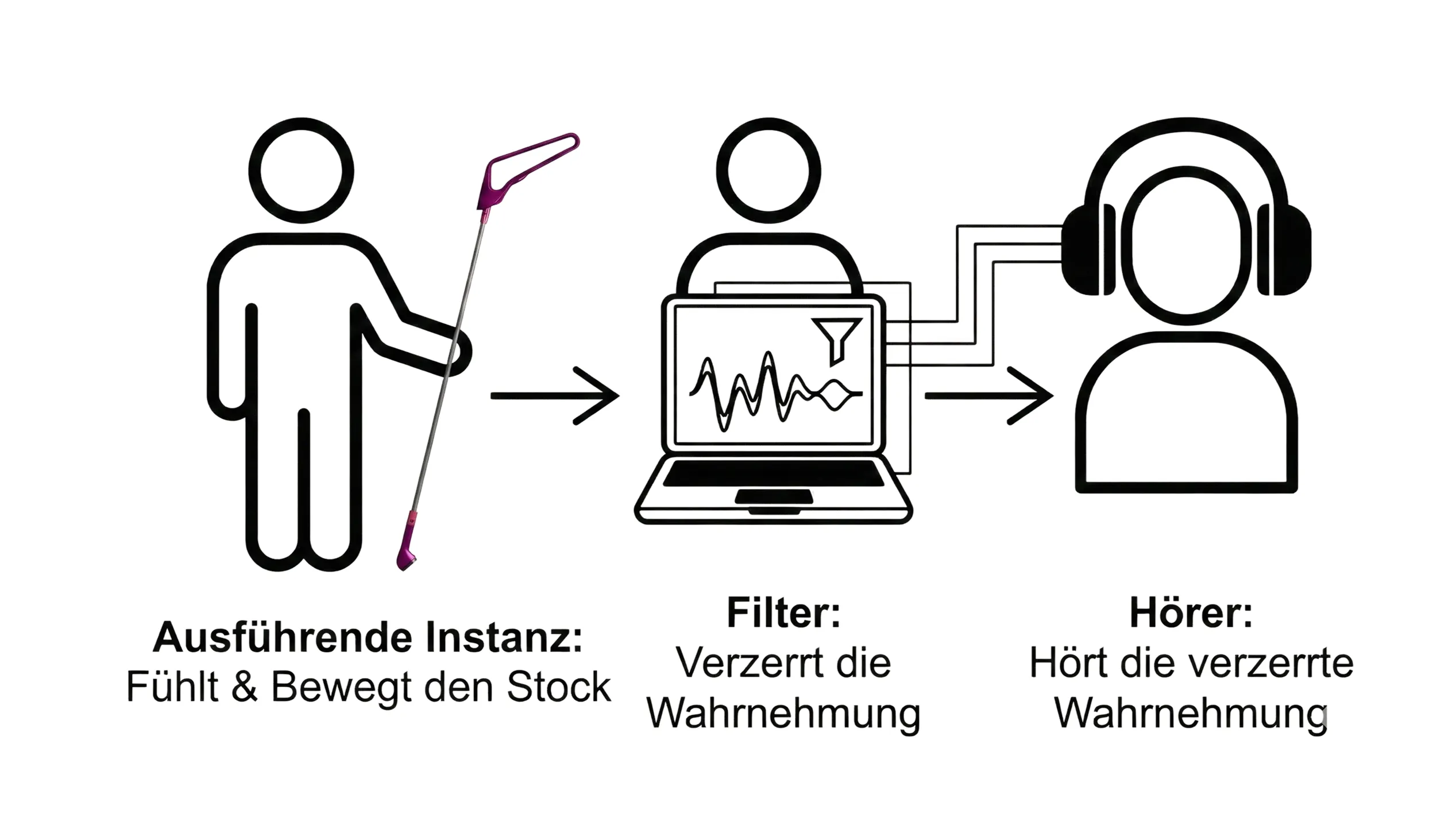
Concept & Implementation
A modular rod system with interchangeable attachments captures vibrations and material structures from the environment via a contact microphone. The signal is processed audiovisually in real time: on one hand through distorted sound output via headphones, and on the other through the dynamic manipulation of a point cloud visualization within a Blender workflow.
Showroom