Scoopy
Modular robot for human-machine interaction
Overview
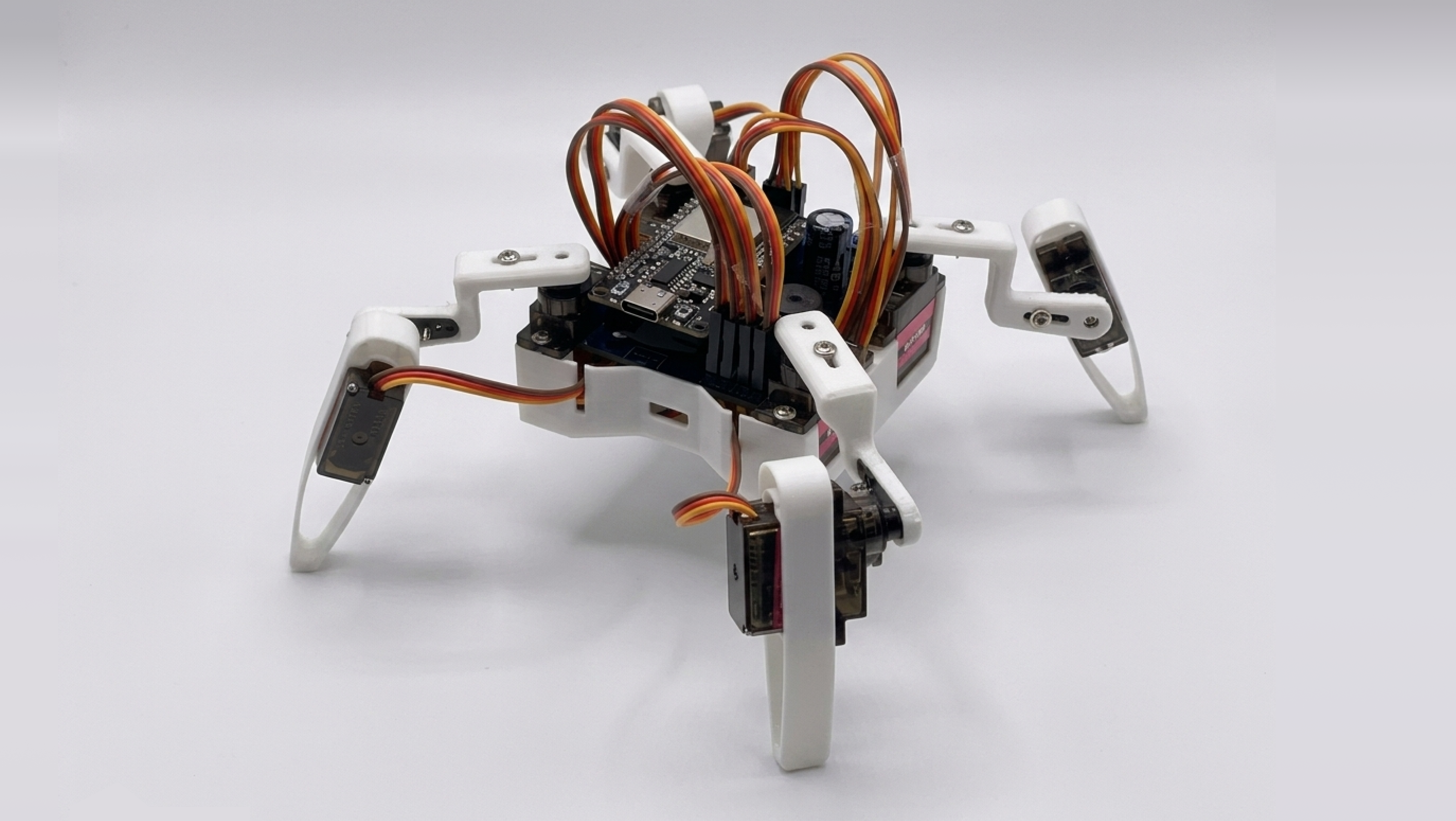
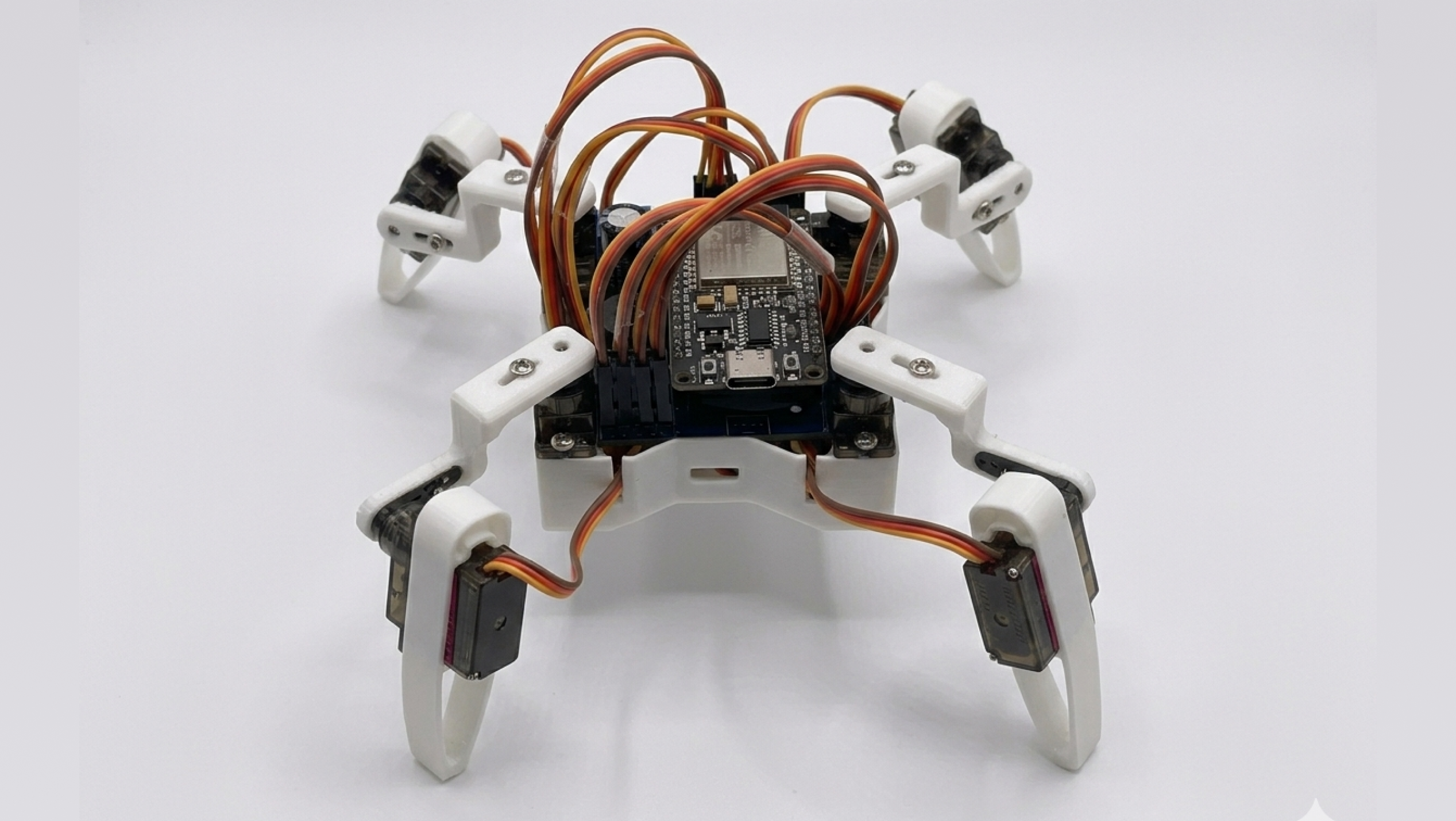
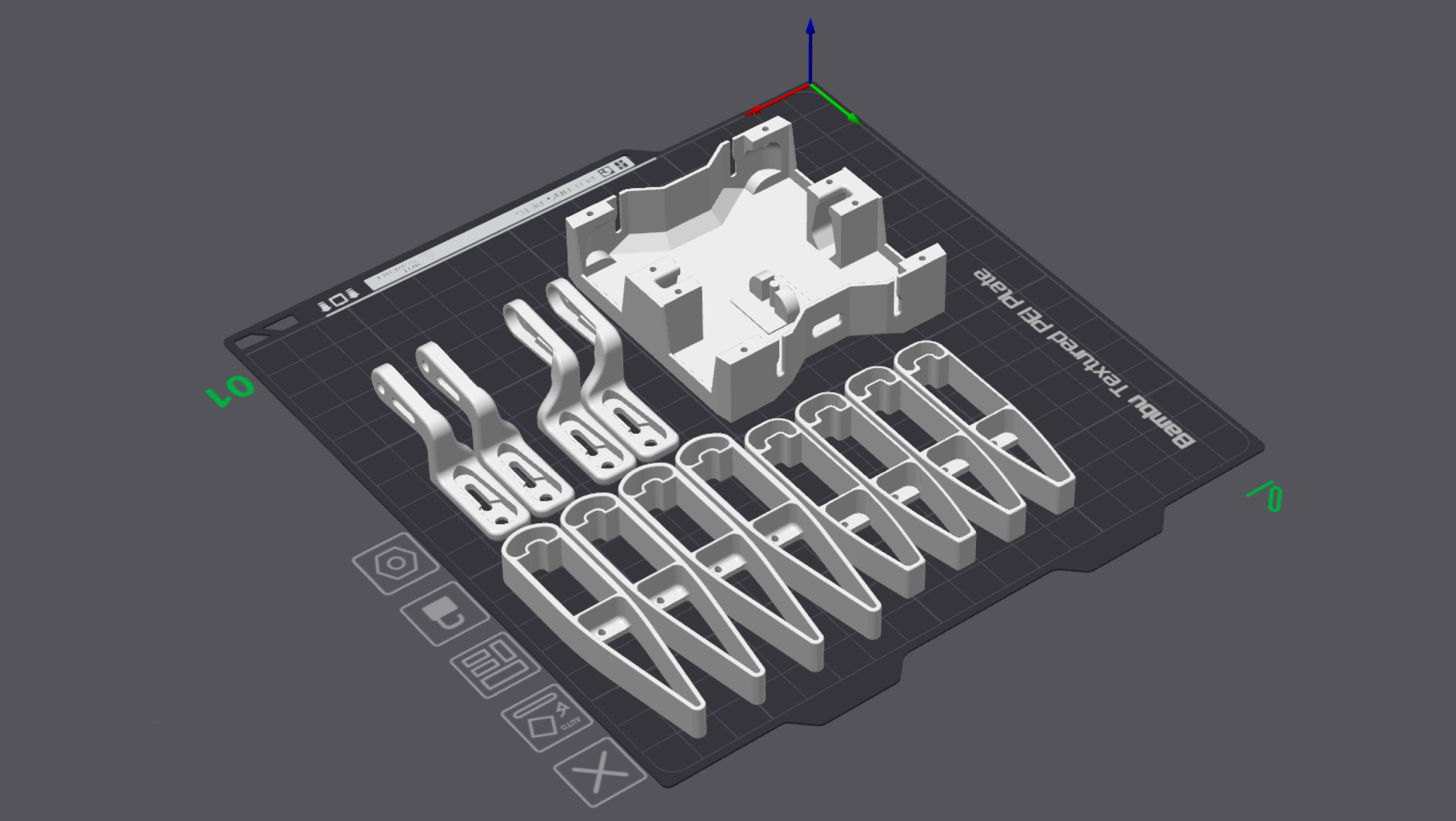
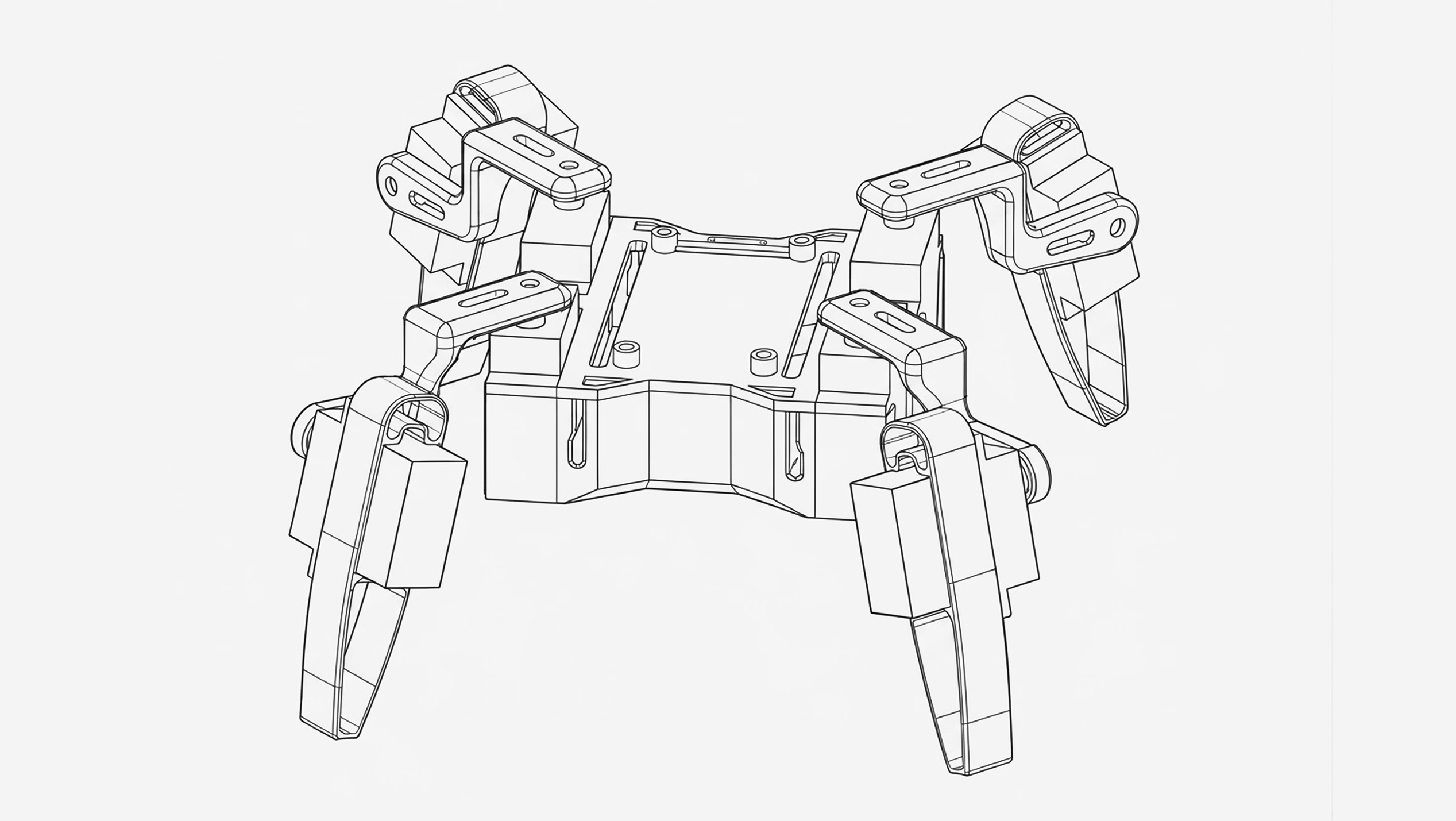
Scoopy is a servo-driven, four-legged robot with its own controller and Wi-Fi connectivity. As part of a study project, it was developed as an experimental system that combines functional locomotion with accessible, interactive design.
Challenge
In addition to the technical implementation of a walking robot, the goal was to systematically investigate and reduce barriers to entry in robotics. This required a thoughtful combination of functional movement and trust-building behavior.
Concept & Implementation
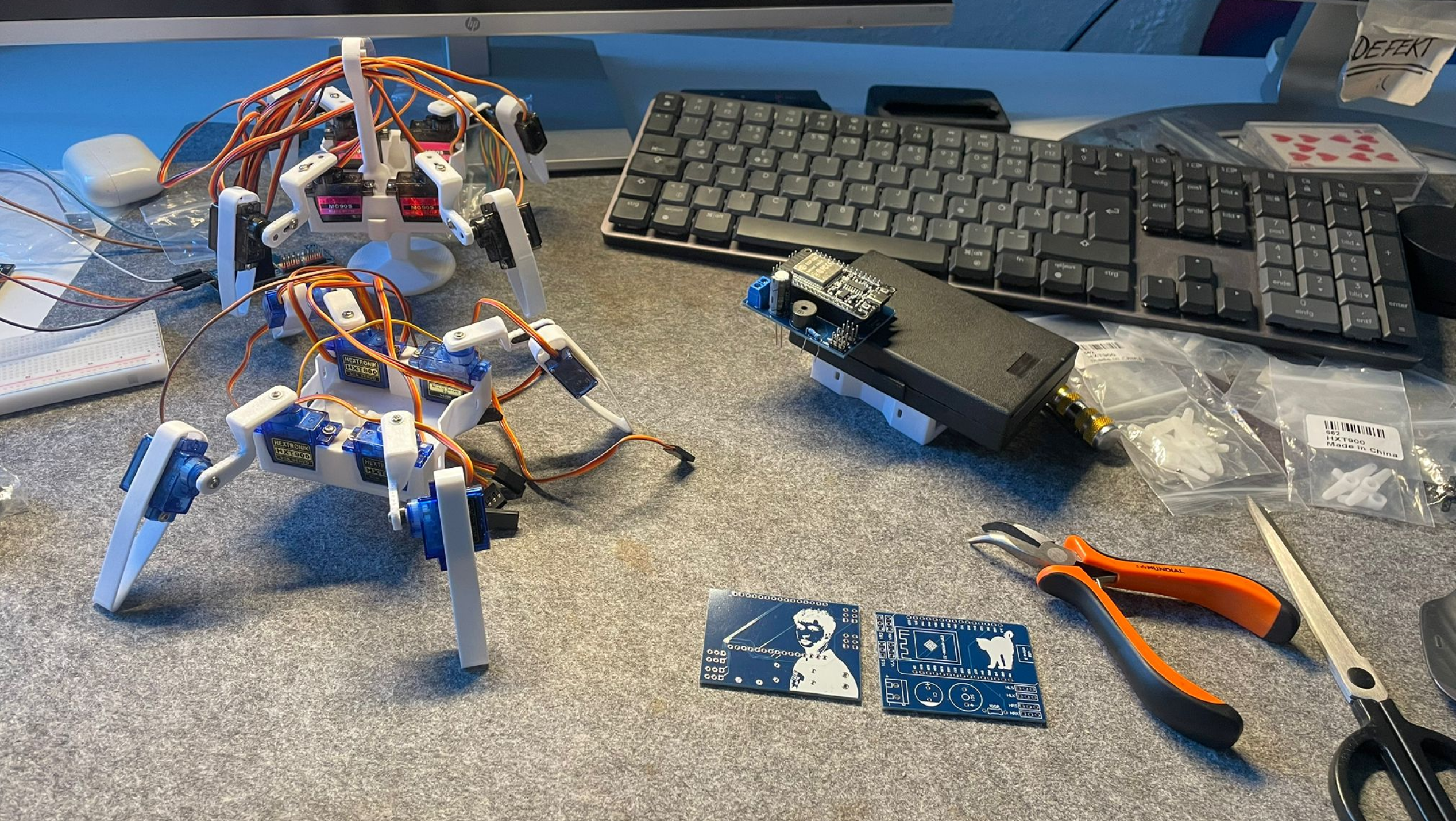
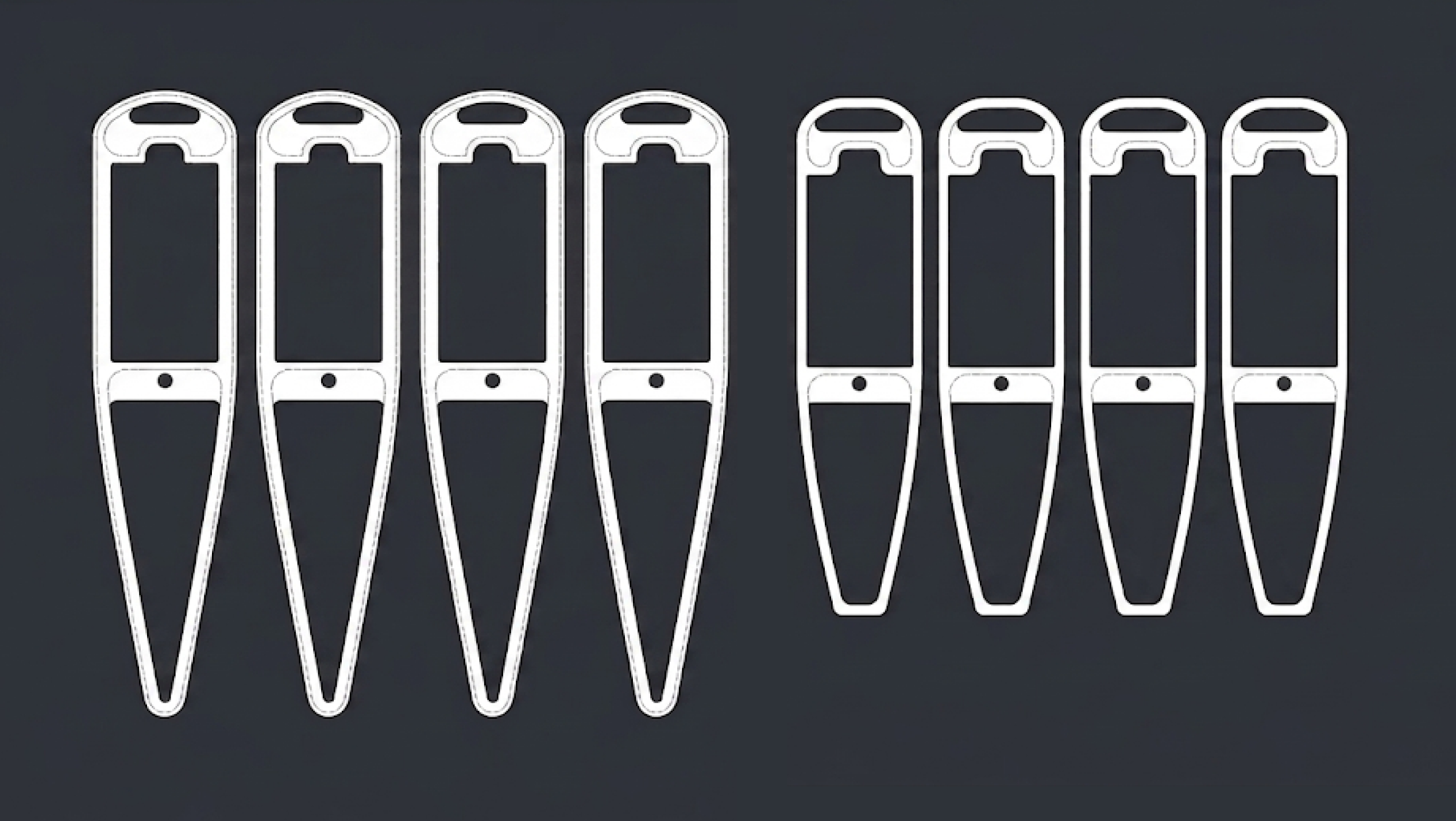
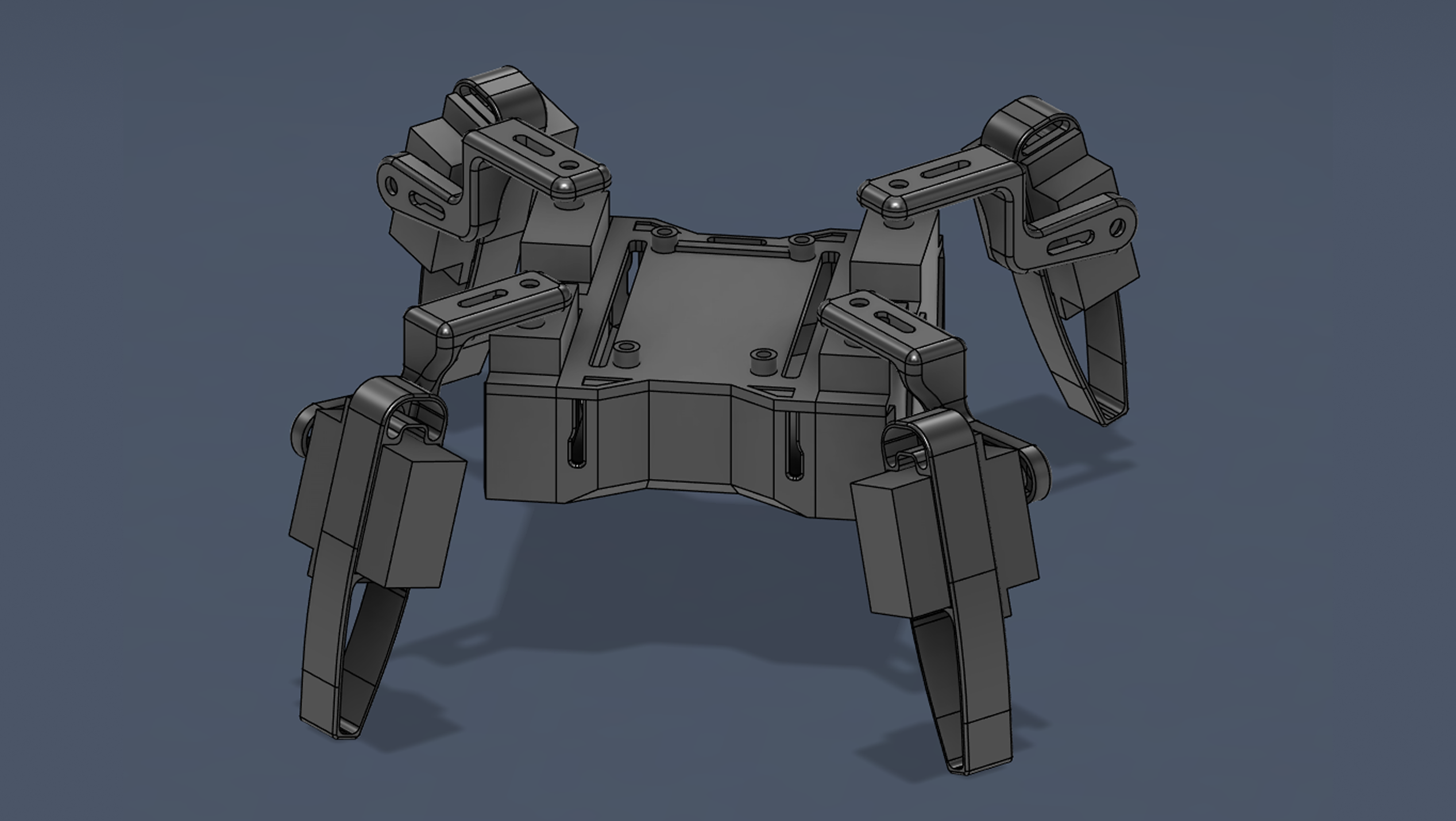
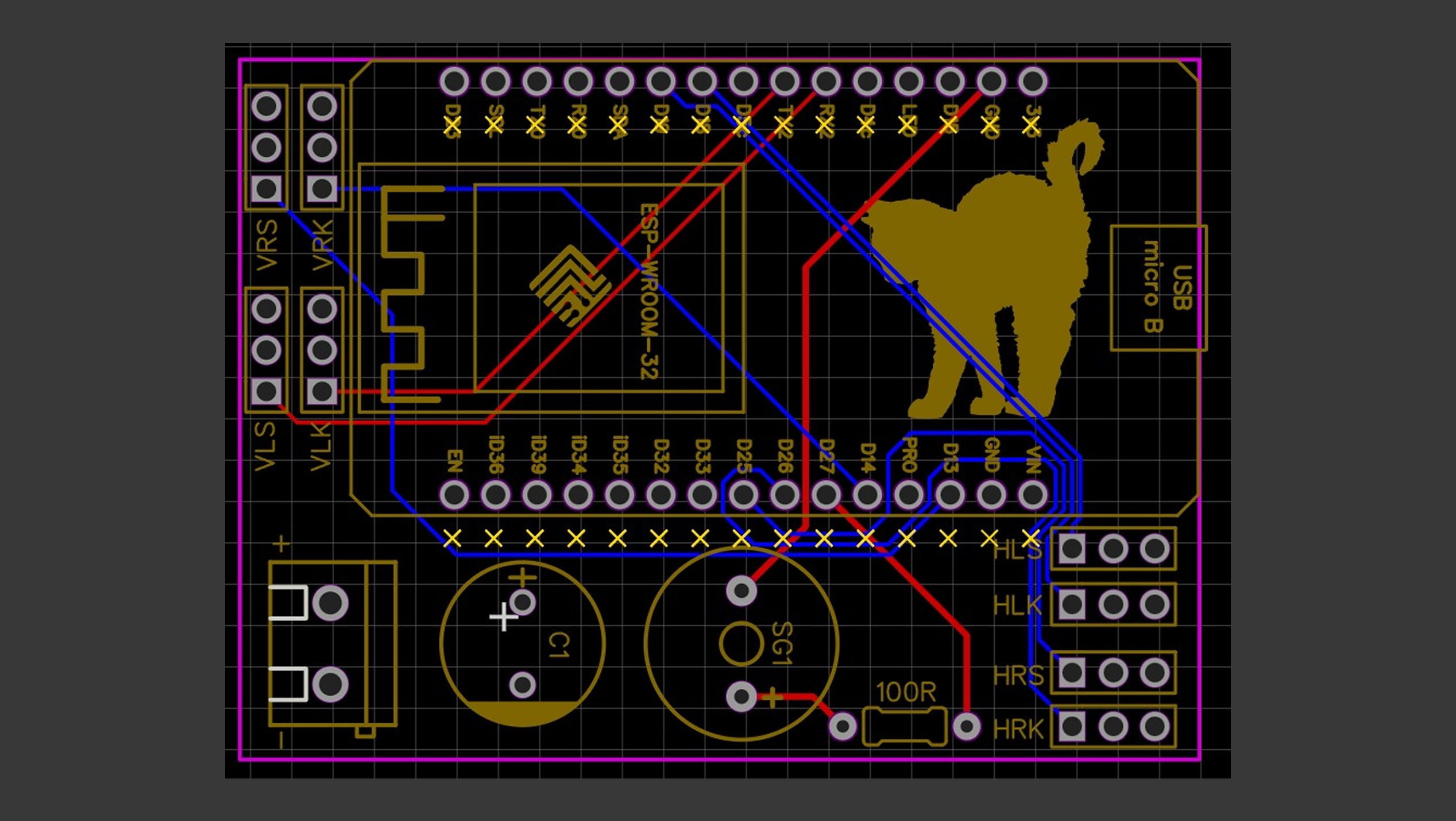
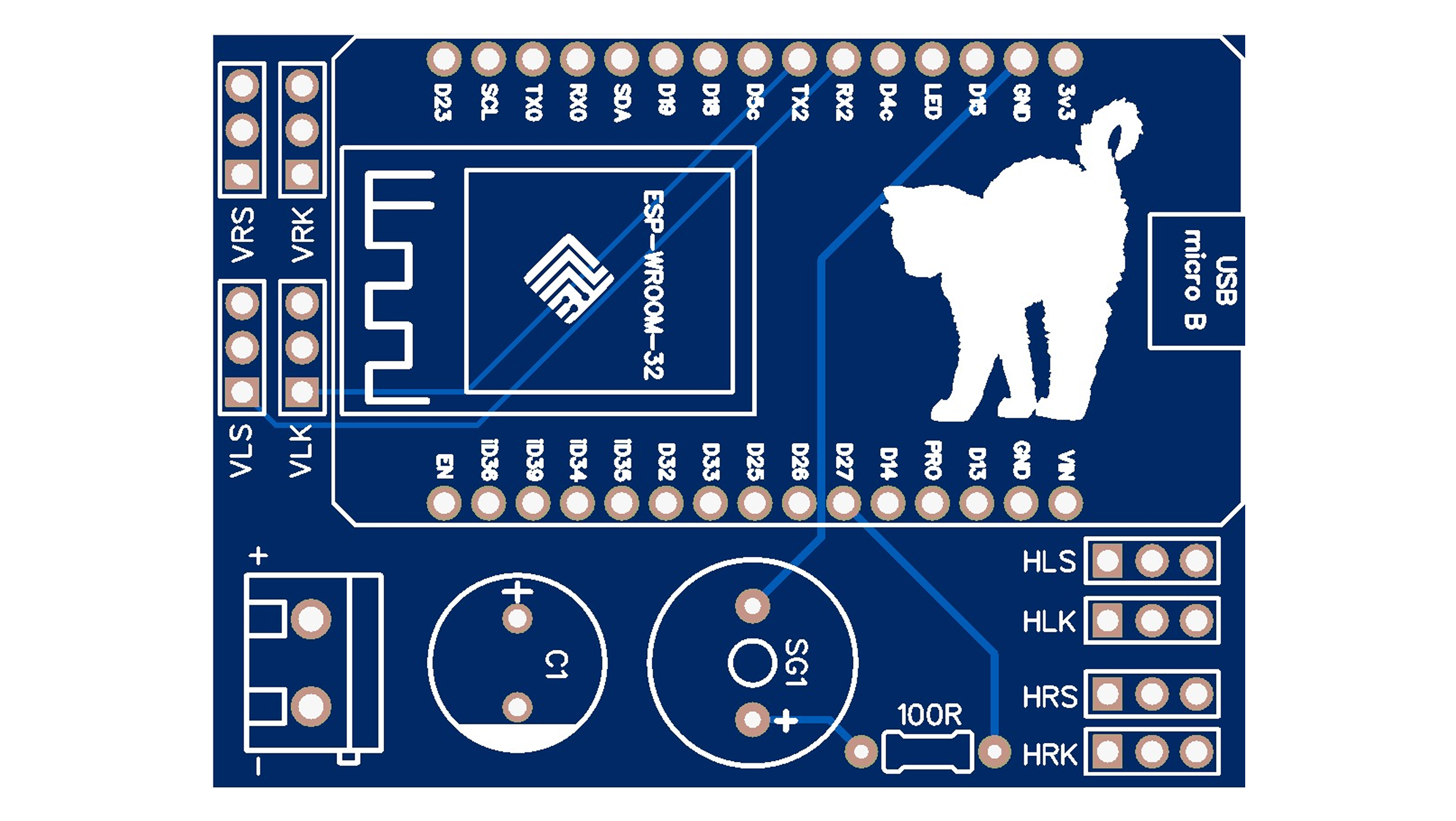
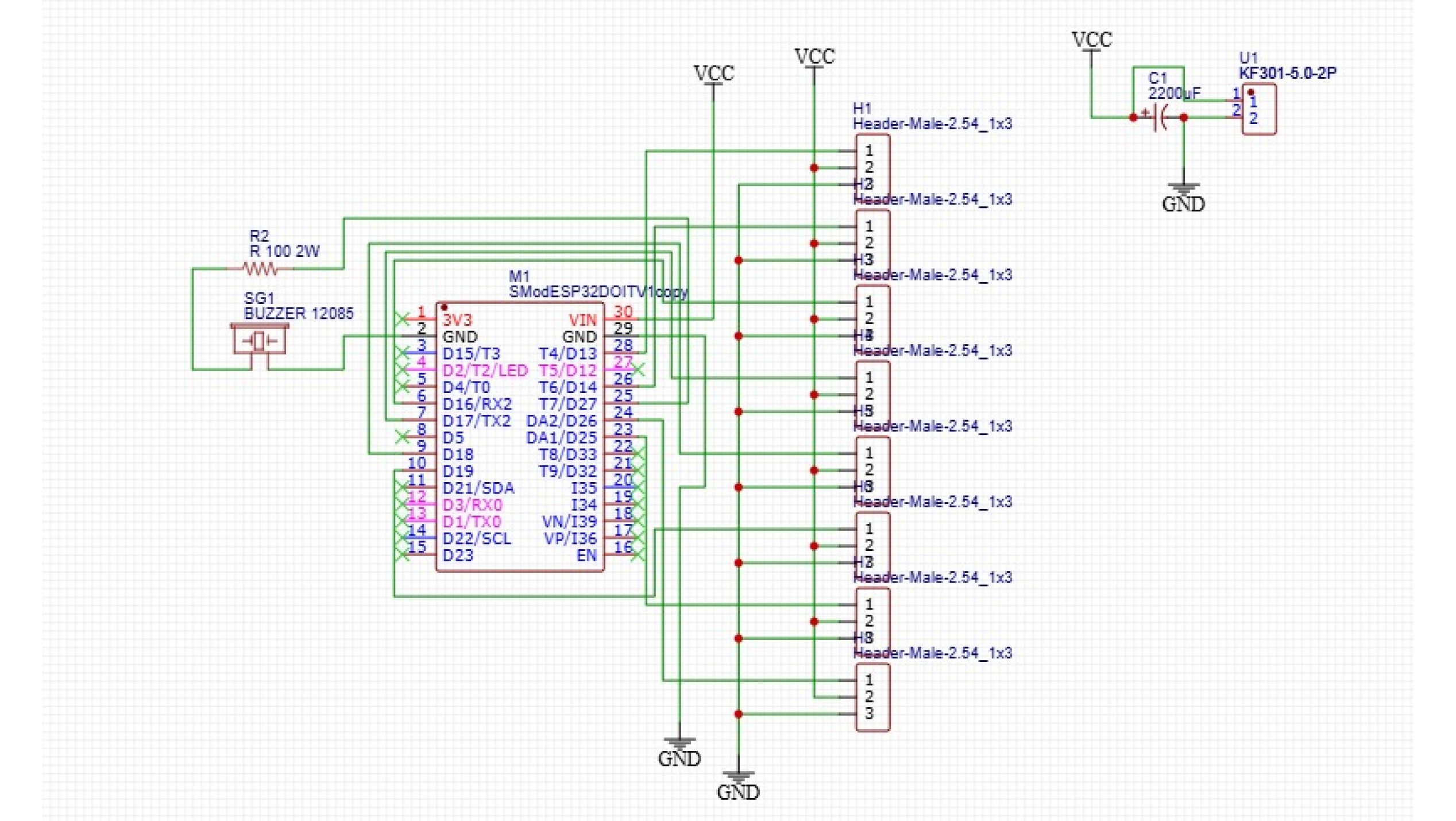
Development of a modular robot system including CAD design, custom PCB design, and controller programming. Through a behavior design approach, movements, gestures, and sounds are are intentionally used to make interaction intuitive and to build trust in the system.
Showroom