Traffic Owl


KI-gestütztes Ampel-System für Verkehrsübergänge
Überblick
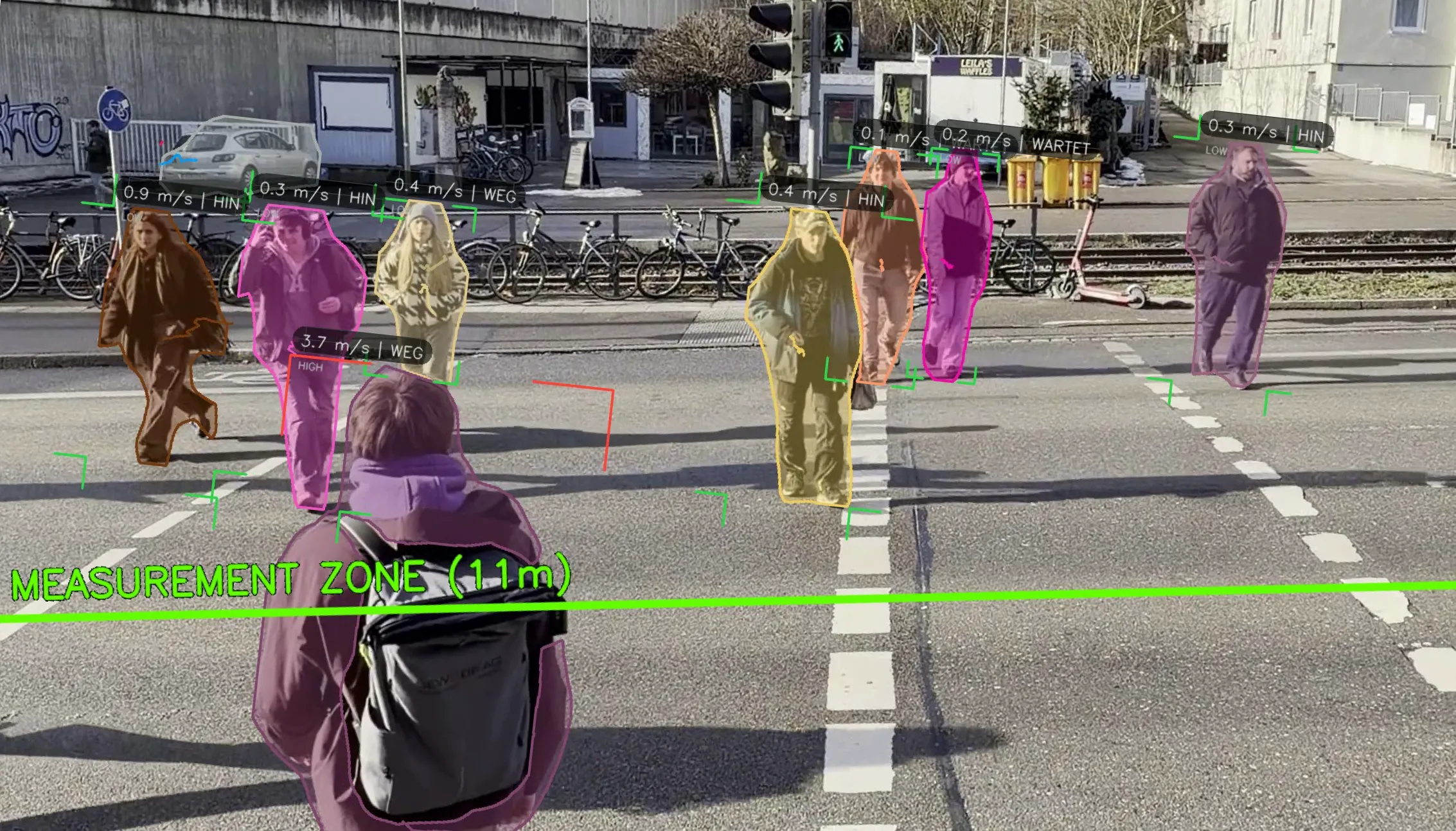
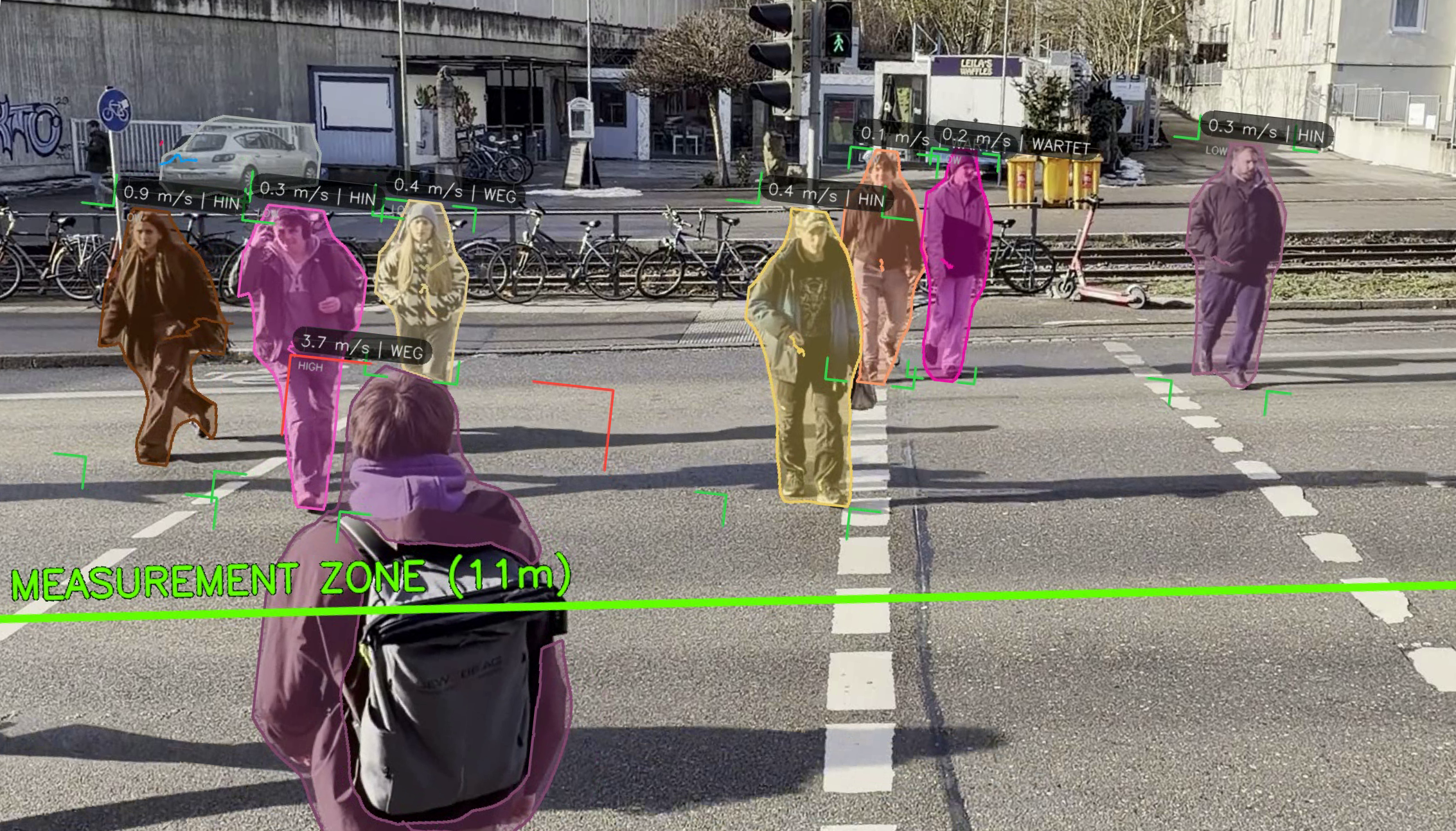
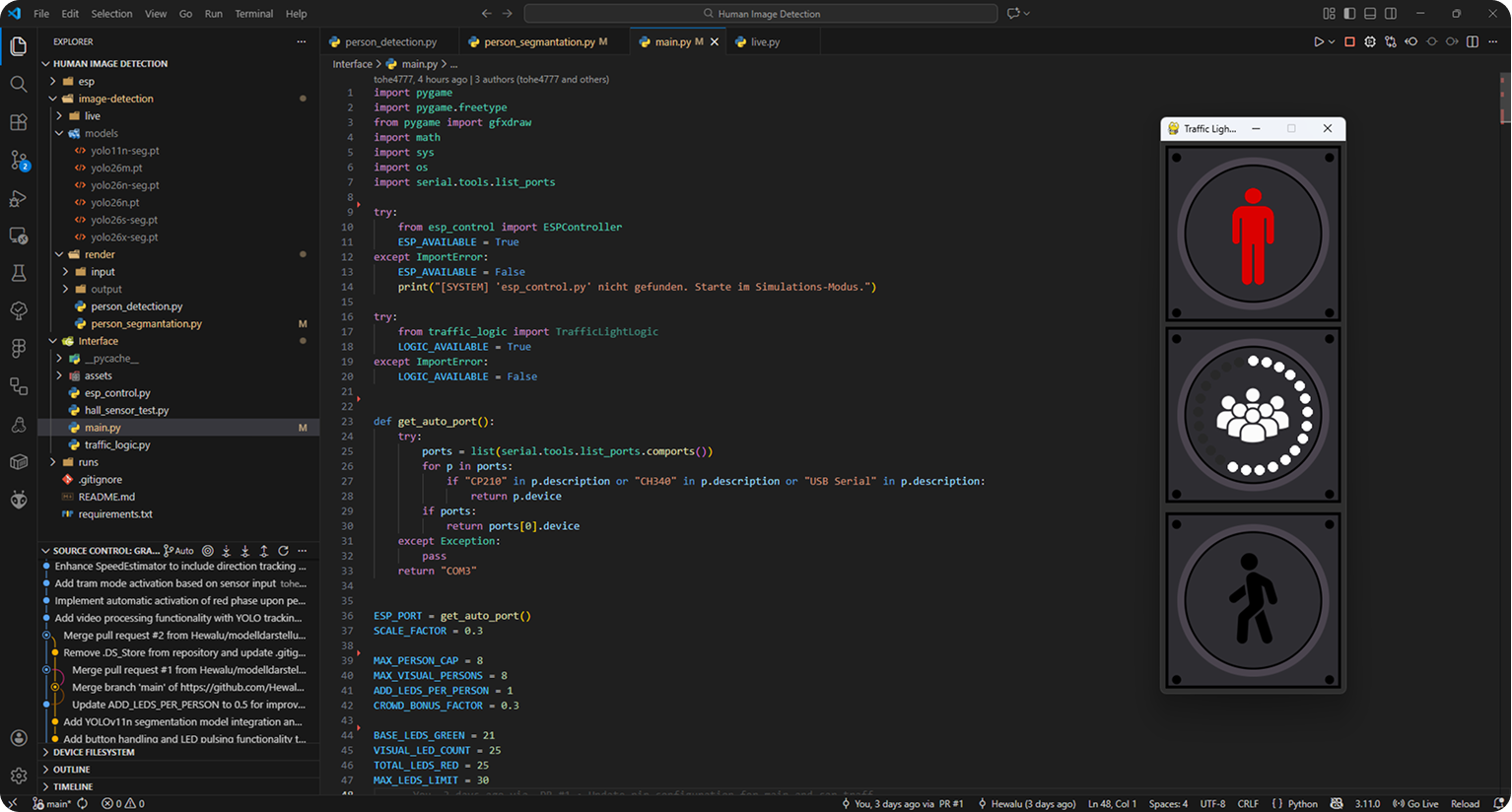
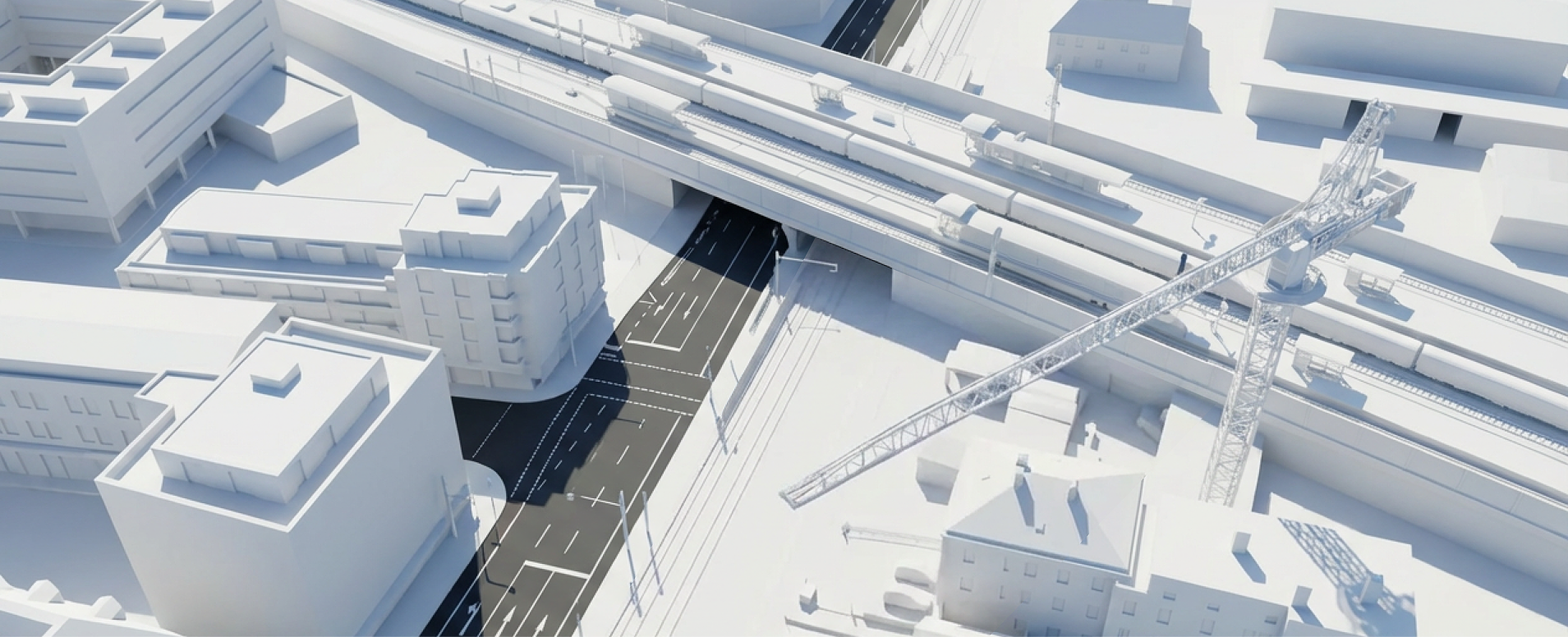
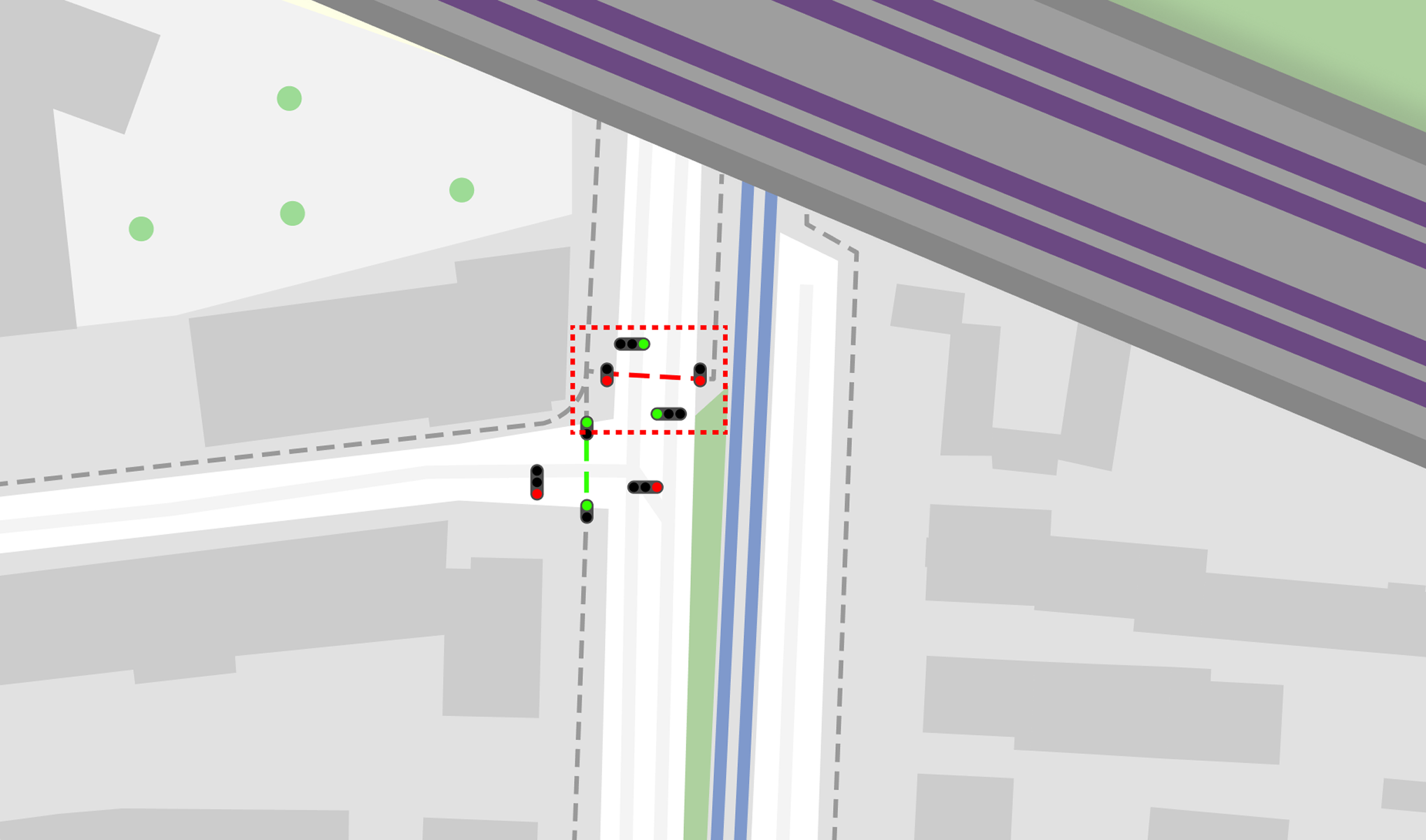
Traffic Owl ist ein kamerabasiertes, adaptives Steuerungssystem zur Verkehrsregelung, das mithilfe von Objekterkennung und Segmentierung in Echtzeit auf das tatsächliche Geschehen im Straßenraum reagiert. Entwickelt in Zusammenarbeit mit Yunex Traffic im Rahmen eines Studierendenprogramms, zielt das Projekt auf die Reduktion von Wartezeiten und die dynamische Koordination von Fuß-, Auto- und Straßenbahnverkehr ab.
Herausforderung
Starre Ampelphasen treffen auf dynamisches Verhalten: Viele Menschen kommen gleichzeitig an, warten lange oder queren unsicher – besonders bei Tram-Umstiegen.
Konzept & Umsetzung
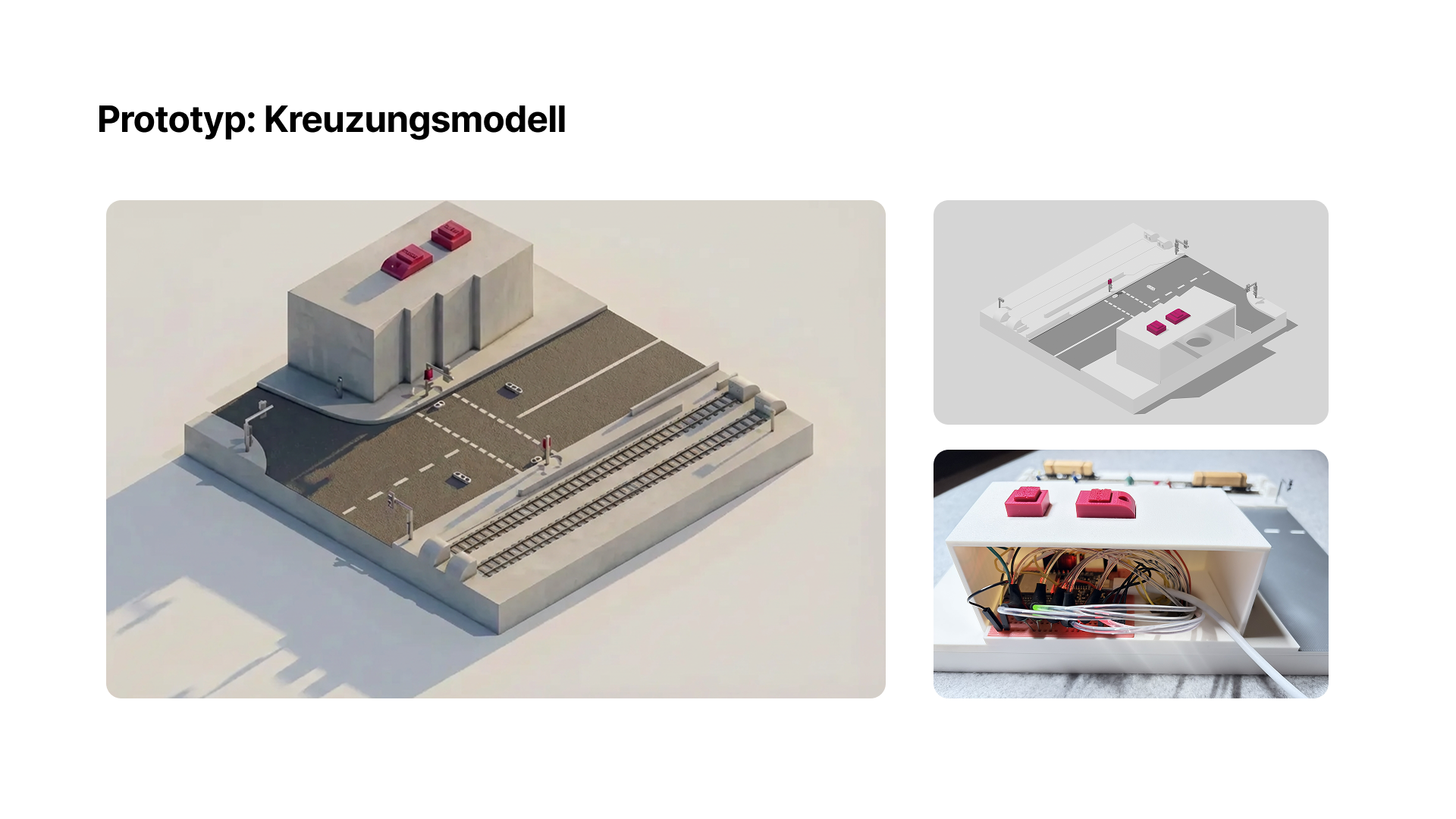
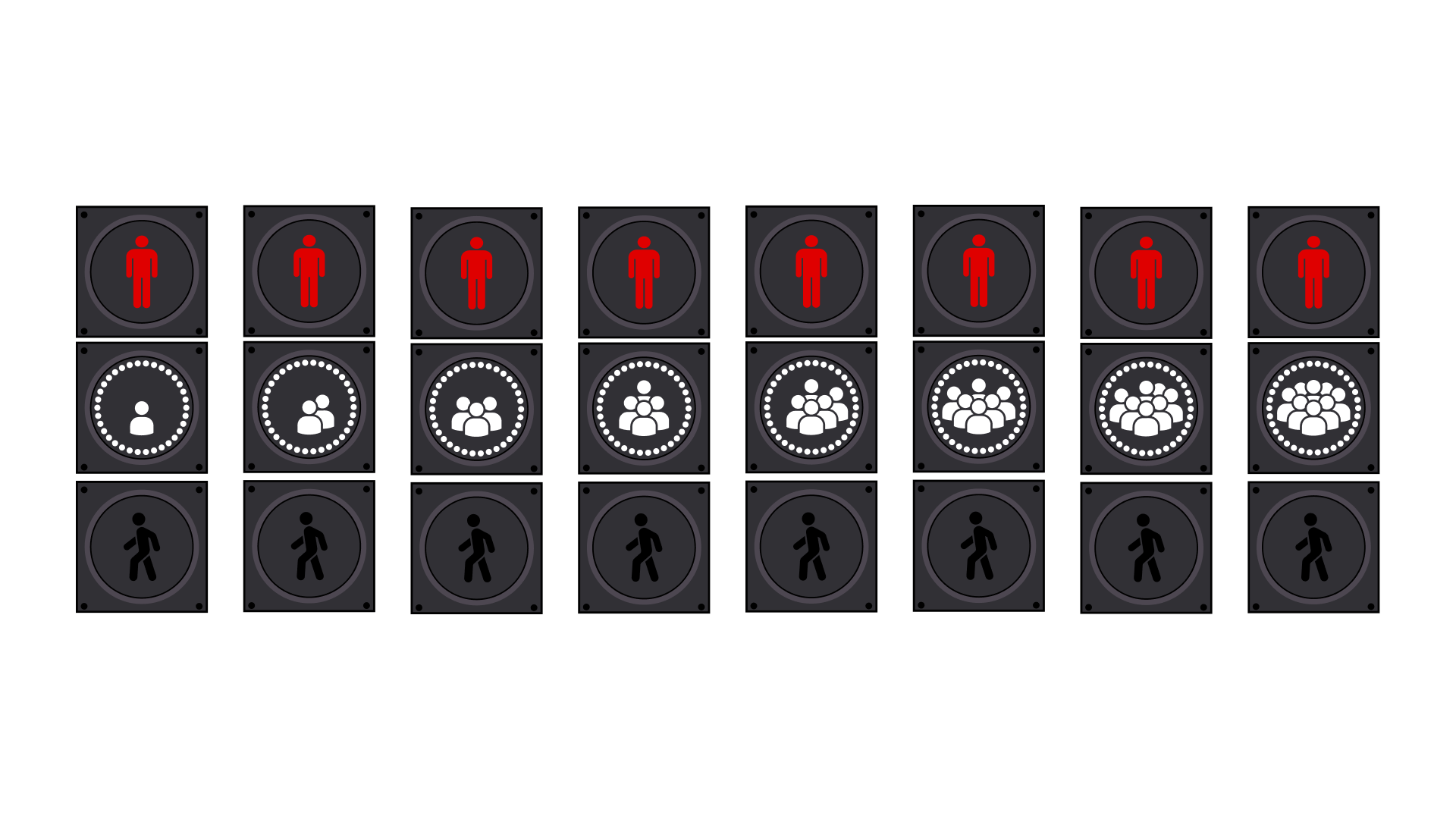
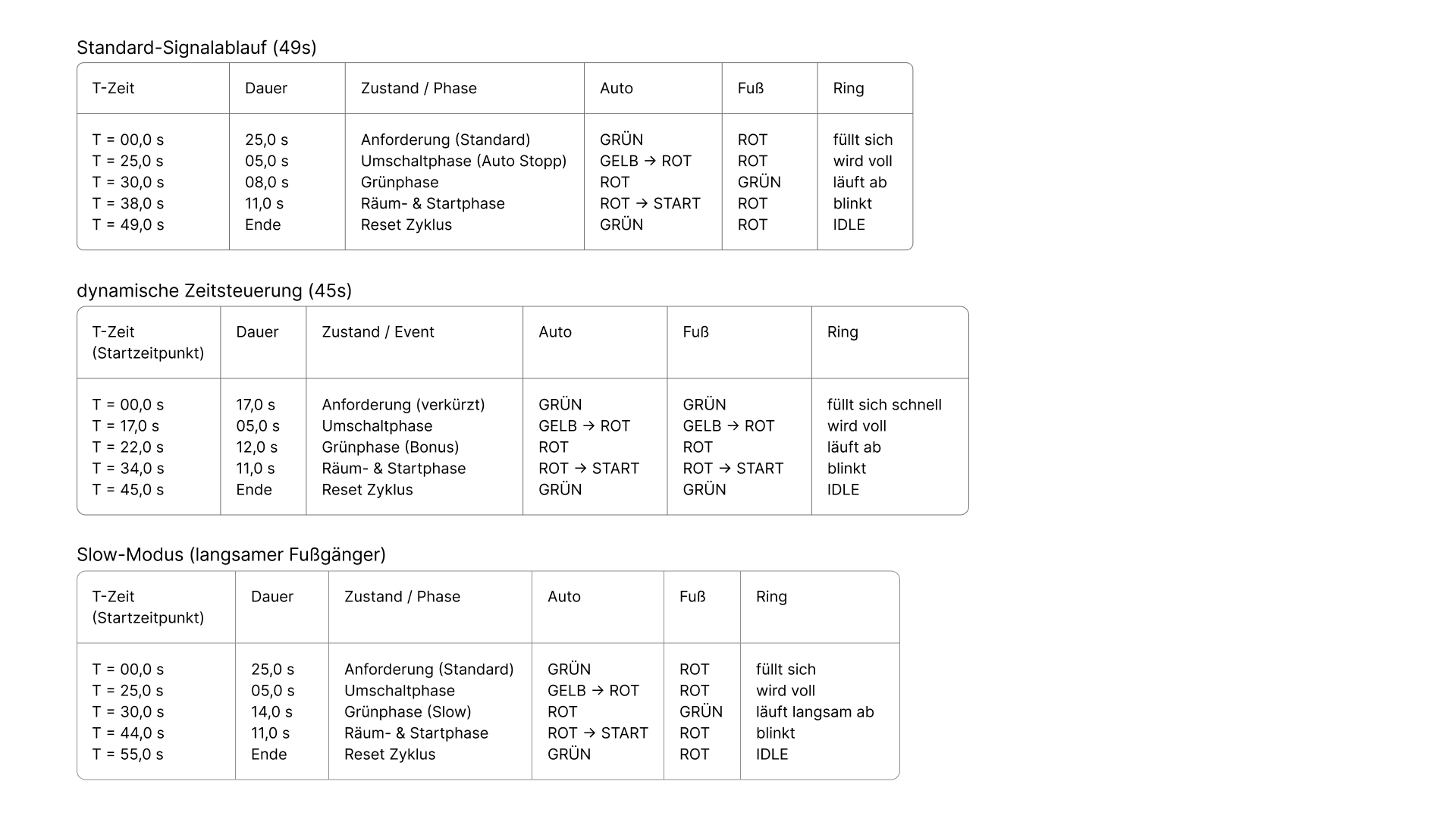
Ein KI-basiertes System erkennt Personen und ihr Verhalten und passt Grünphasen dynamisch an. Der entwickelte Prototyp analysiert Verkehrsströme in Echtzeit, steuert Signalphasen adaptiv und macht seine Entscheidungen durch visuelles Feedback verständlich – für weniger Wartezeit und flüssigere Abläufe.
Showroom




E-Pen

Schriftrekonstruktion mittels ML-Time Series Classification
Überblick
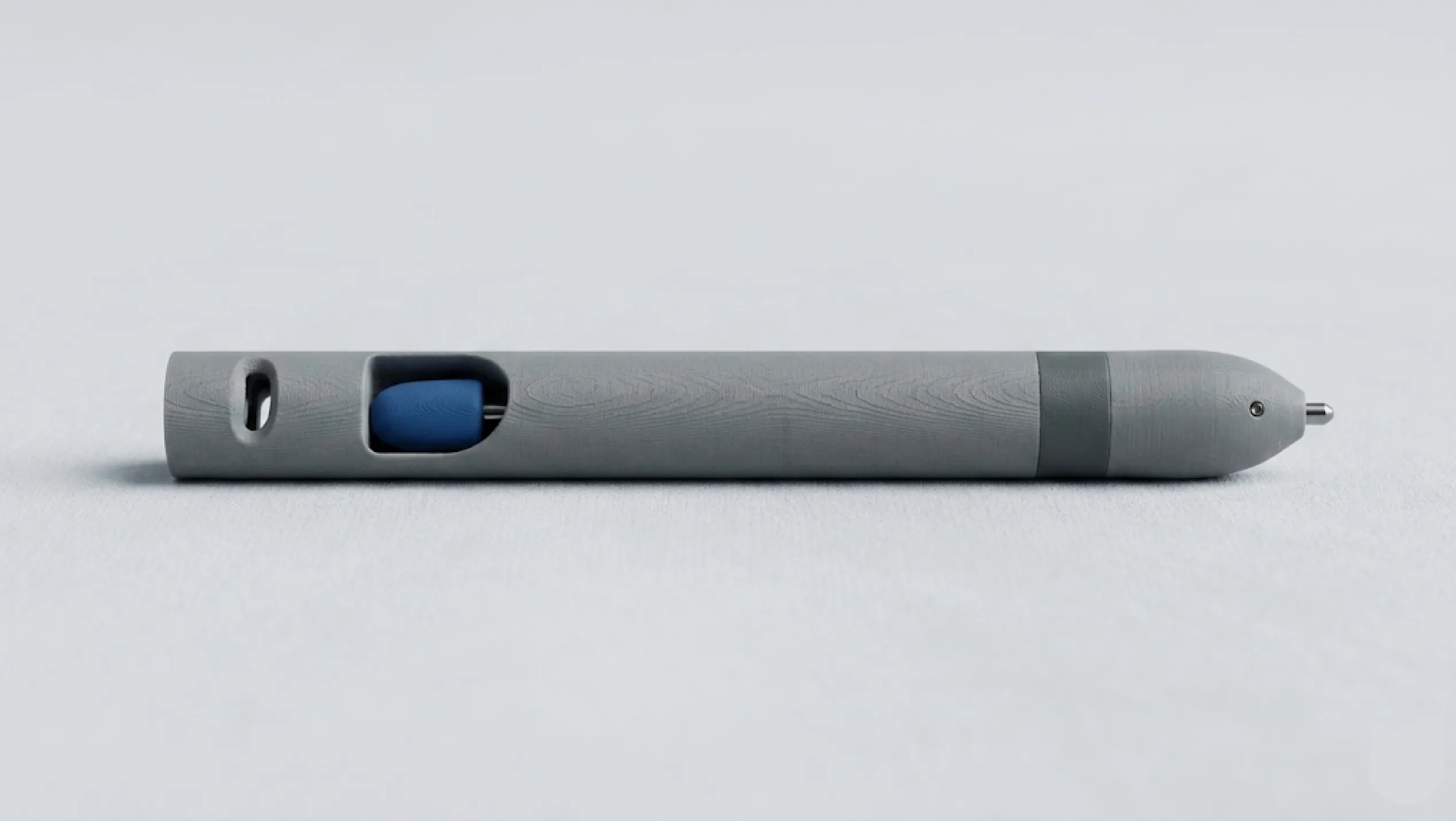
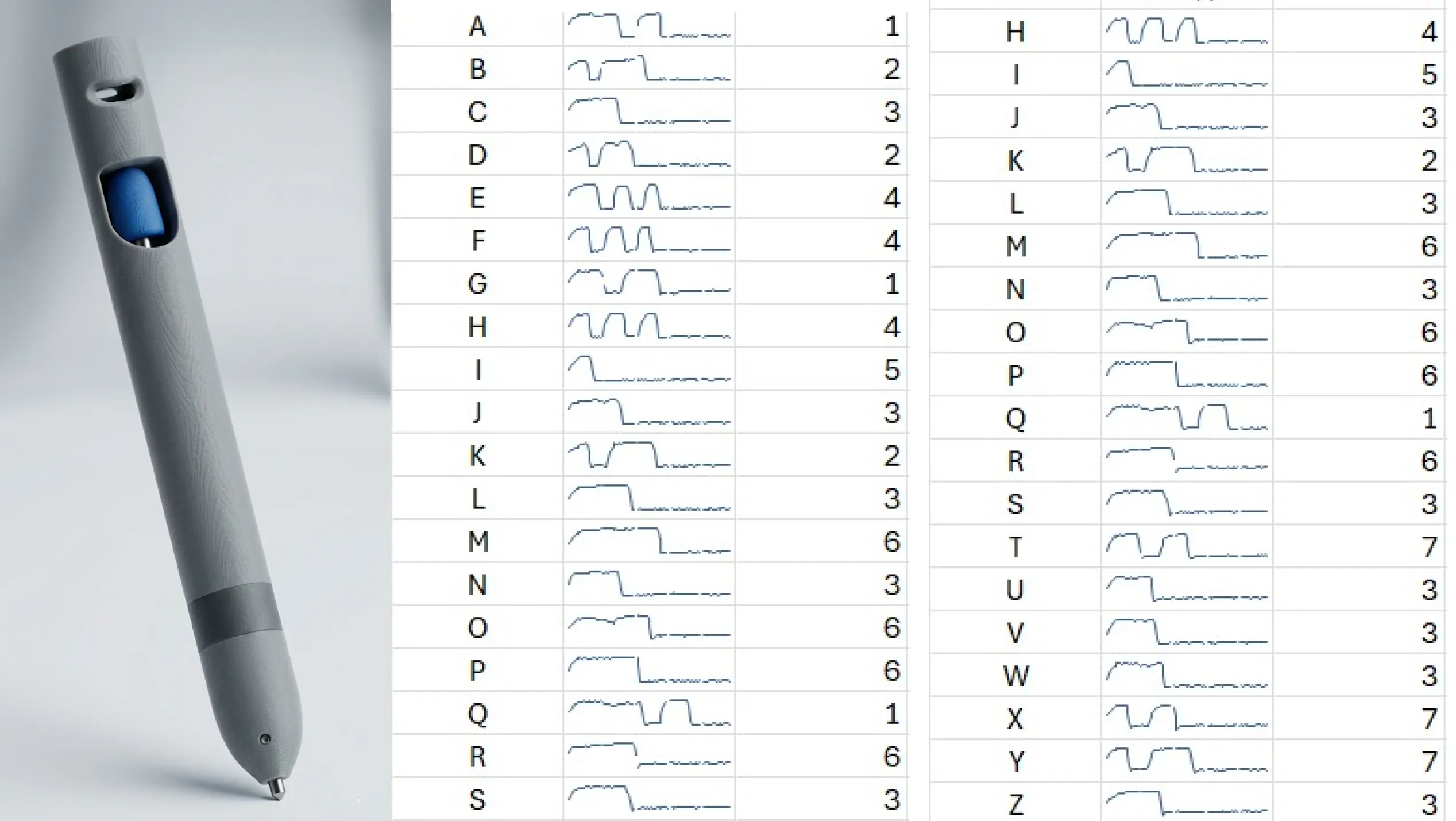
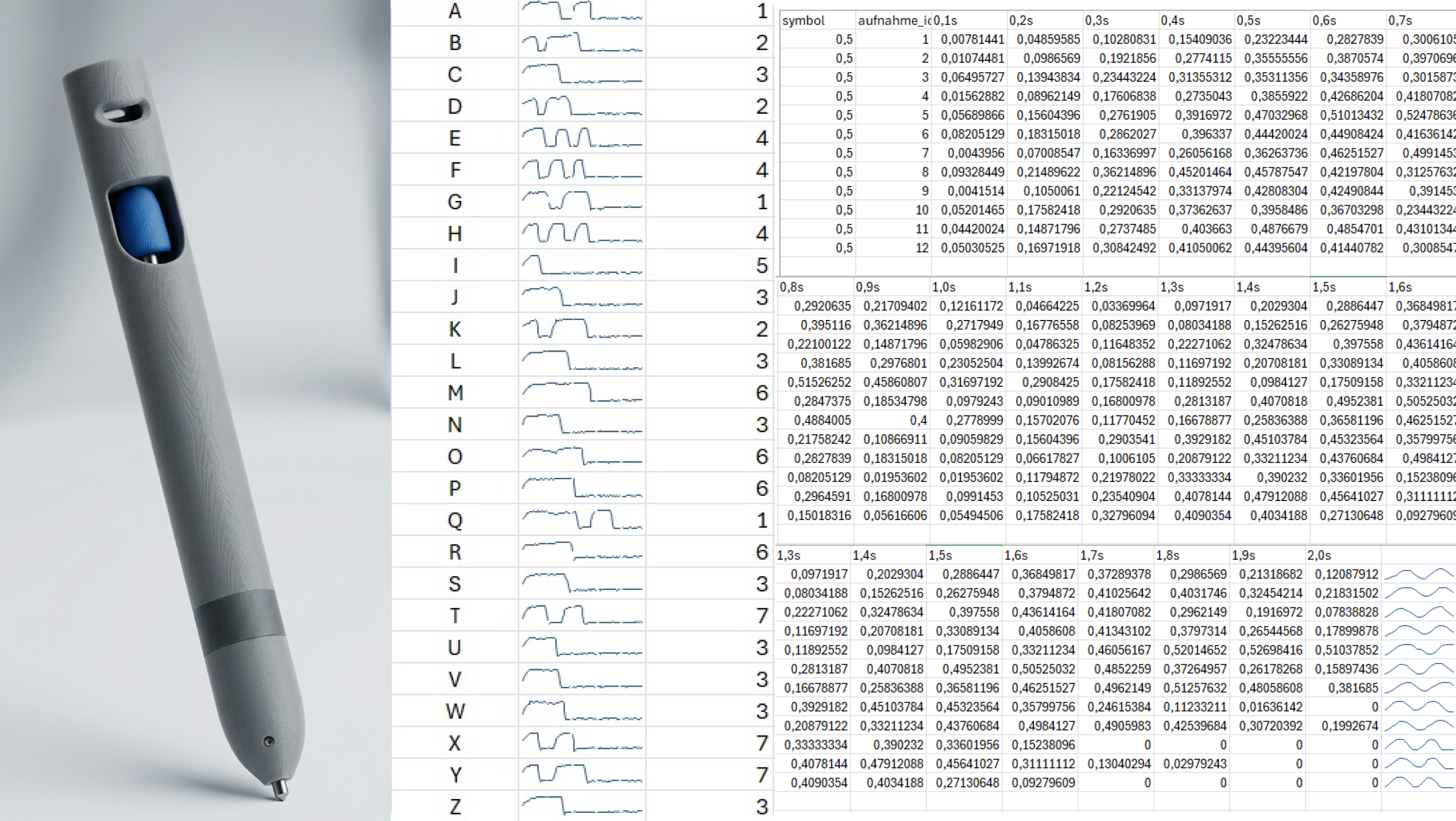
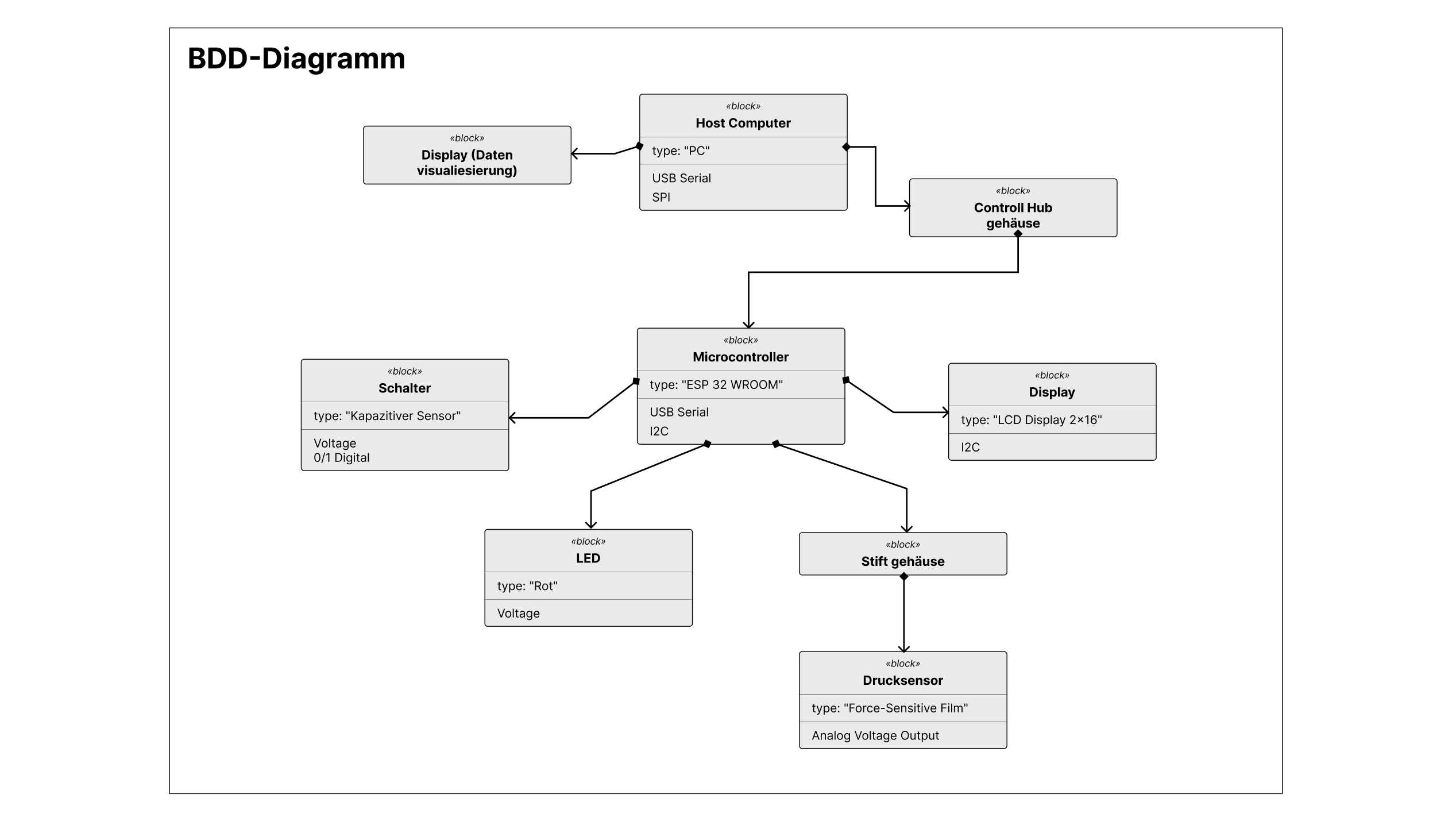
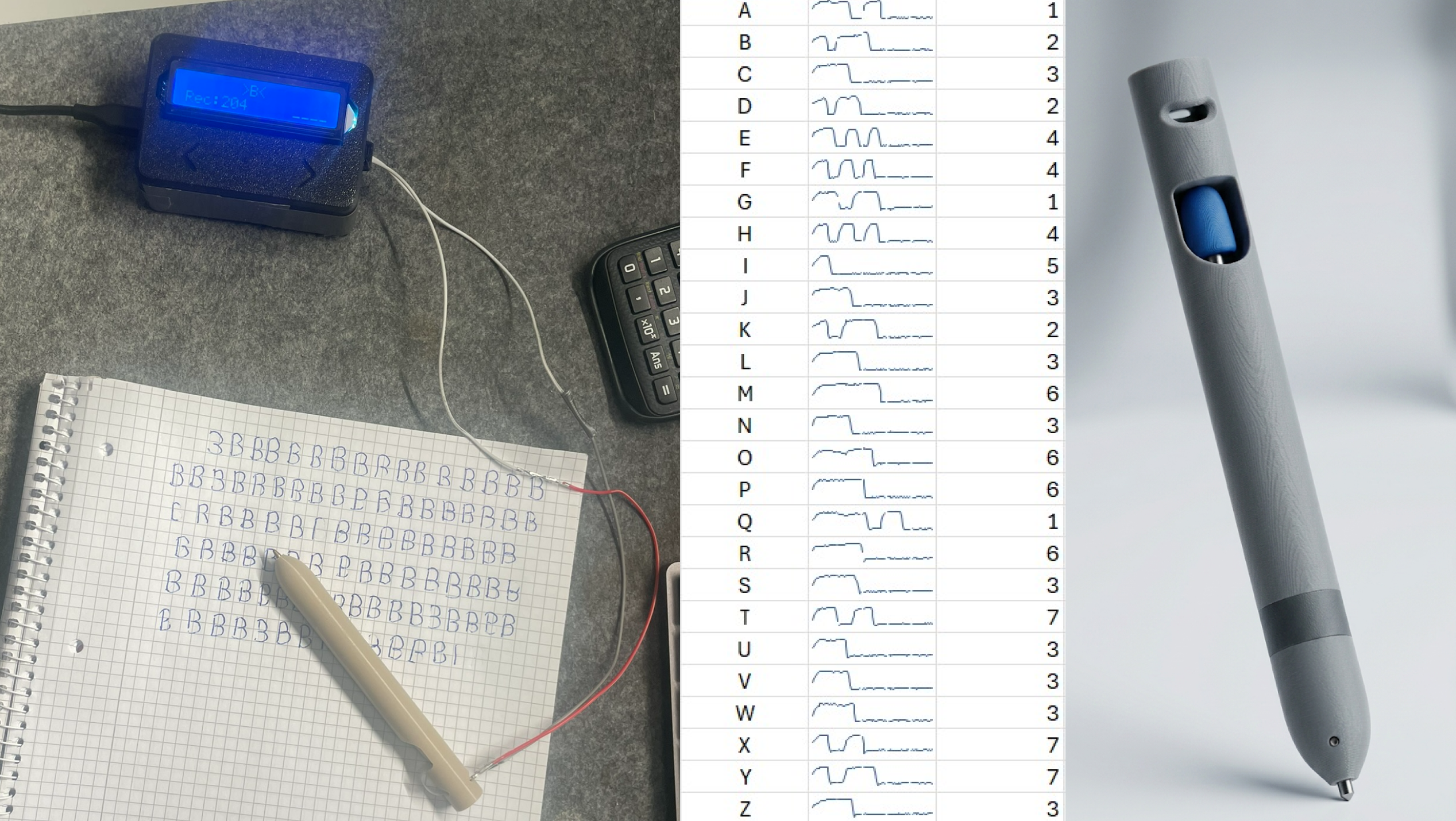
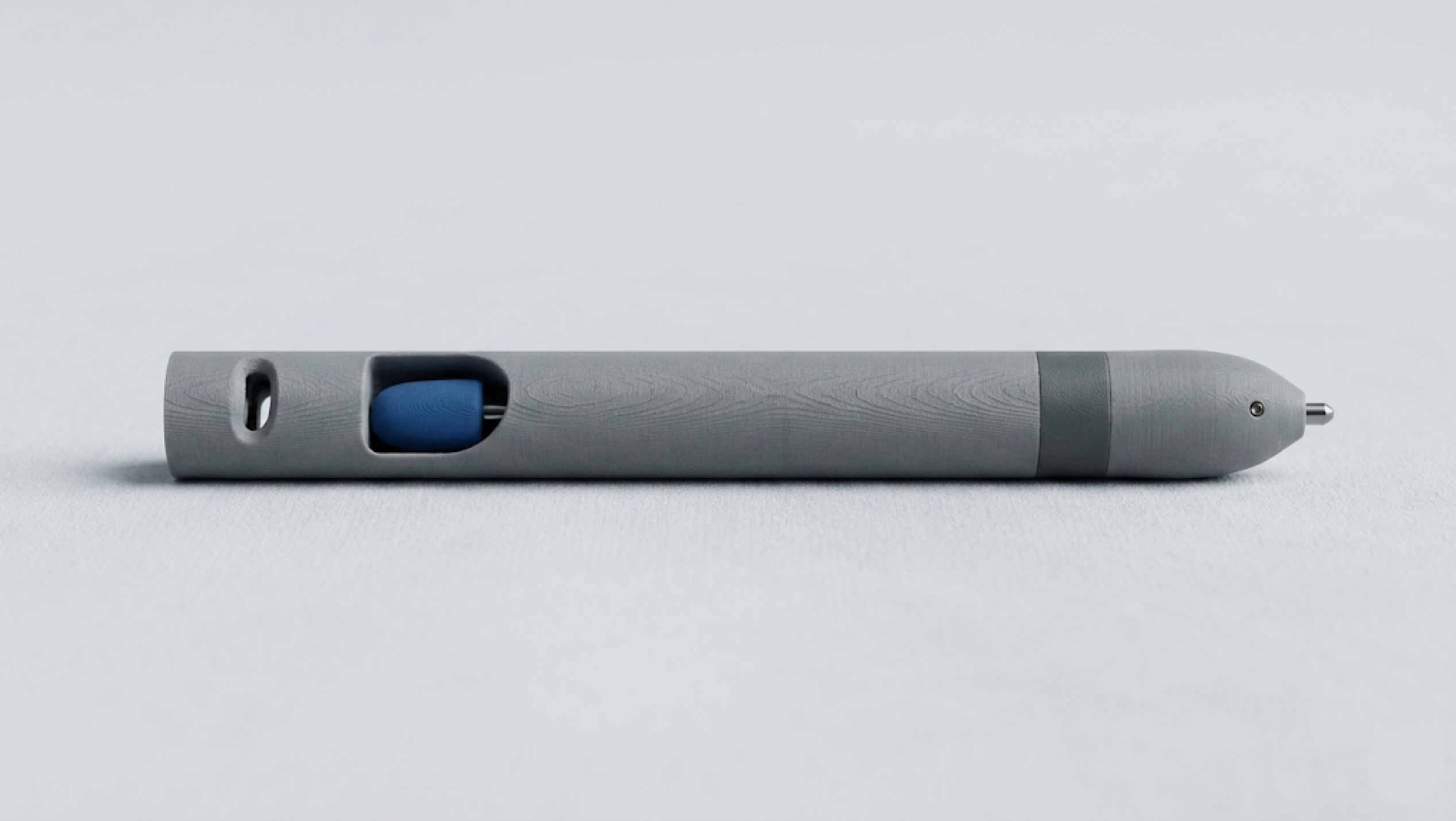
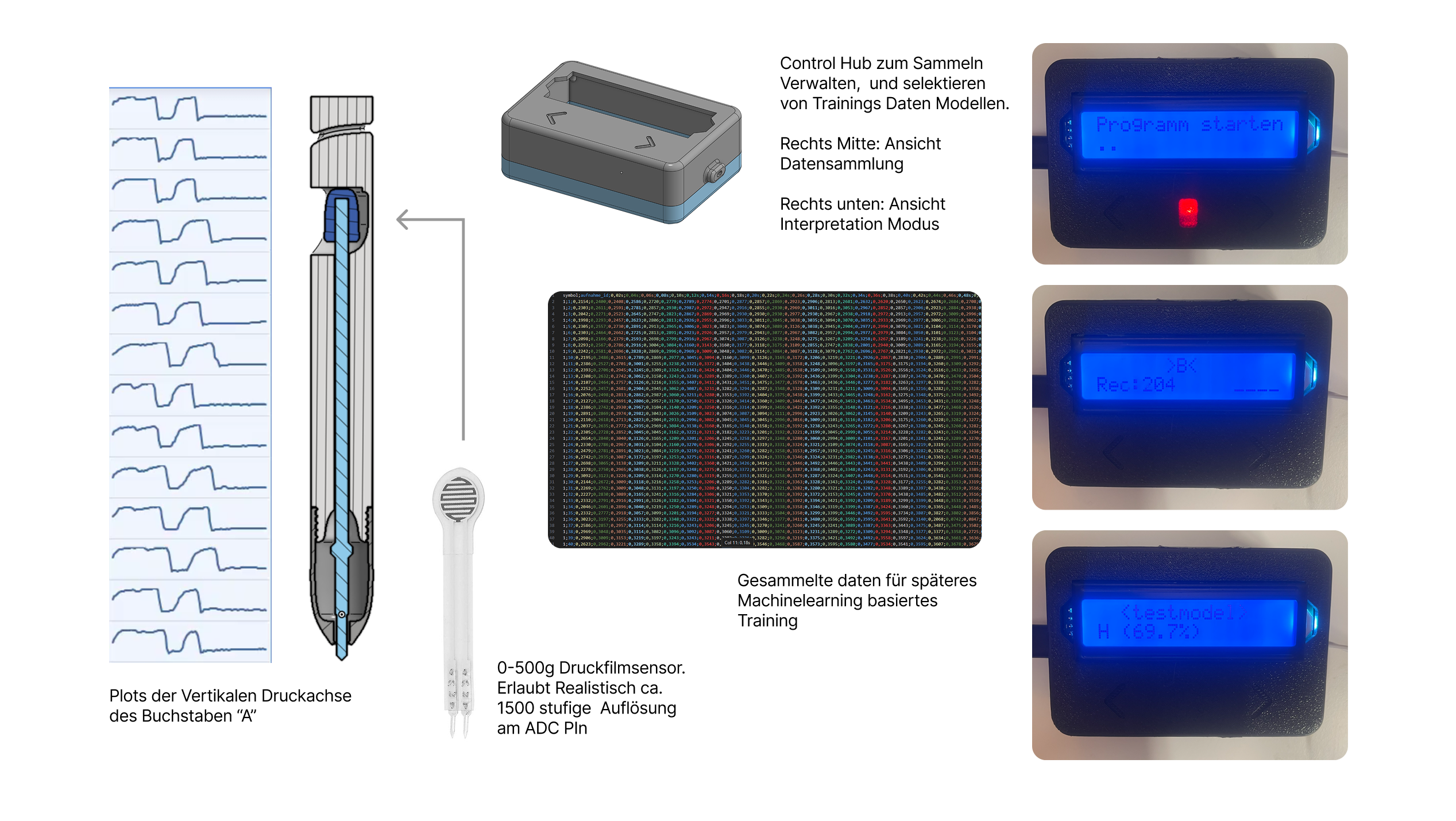
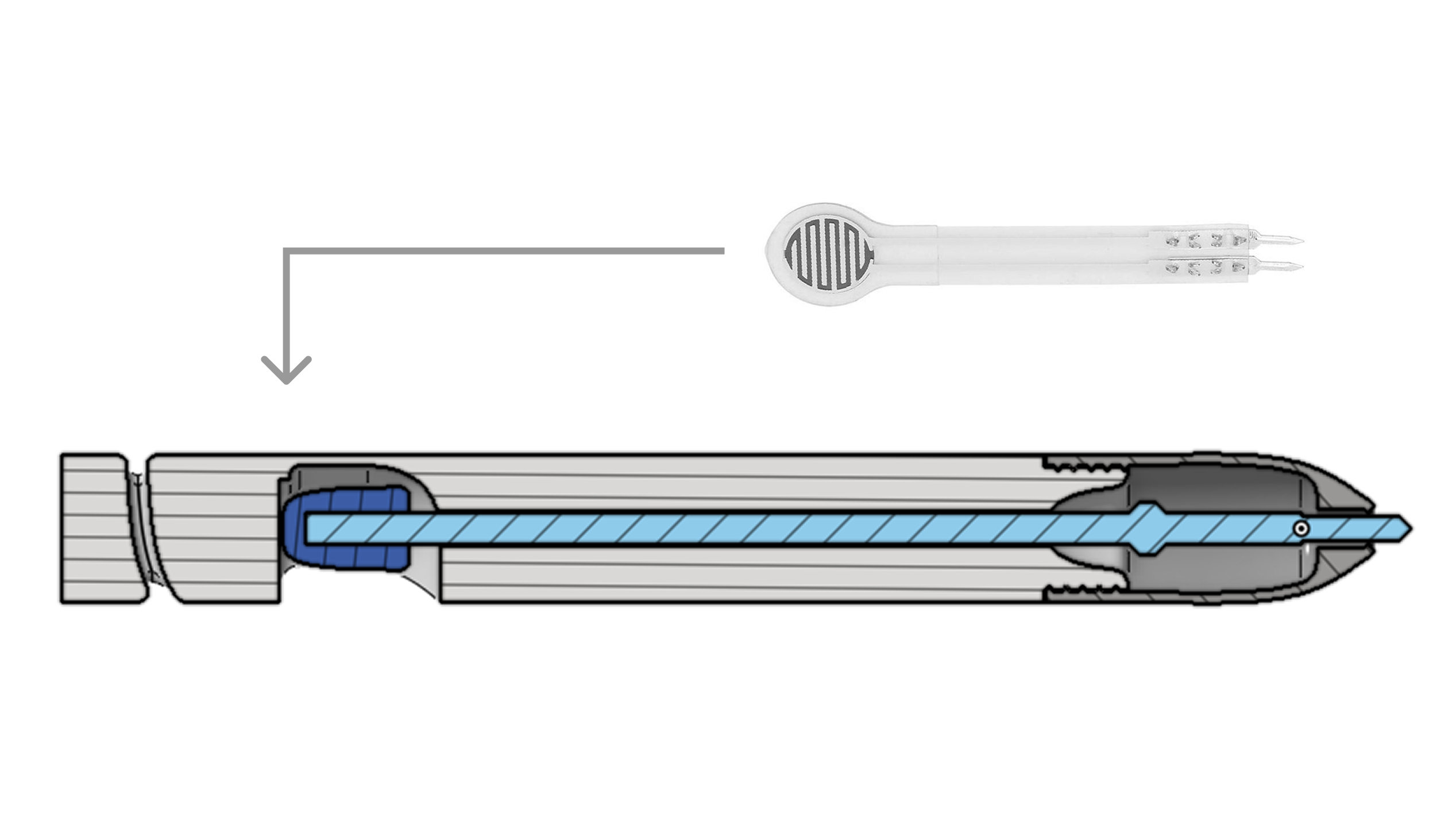
E-PEN ist ein experimentelles Eingabesystem, das Handschrift über ein eindimensionales Drucksignal erfasst und mithilfe von Machine Learning in Text rekonstruiert. Im Fokus steht die Frage, wie viel Informationsdichte tatsächlich notwendig ist – mit dem Ergebnis, dass trotz minimaler Daten überraschend robuste Rekonstruktionen möglich sind.
Herausforderung
Die zentrale Herausforderung lag in der stark reduzierten Datengrundlage: Ein einzelner Sensor liefert lediglich eine eindimensionale Zeitreihe ohne räumliche Information. Um dennoch verwertbare Ergebnisse zu erzielen, waren umfangreiche Datenerhebung sowie die gezielte Nutzung von Kontextinformationen entscheidend.
Konzept & Umsetzung
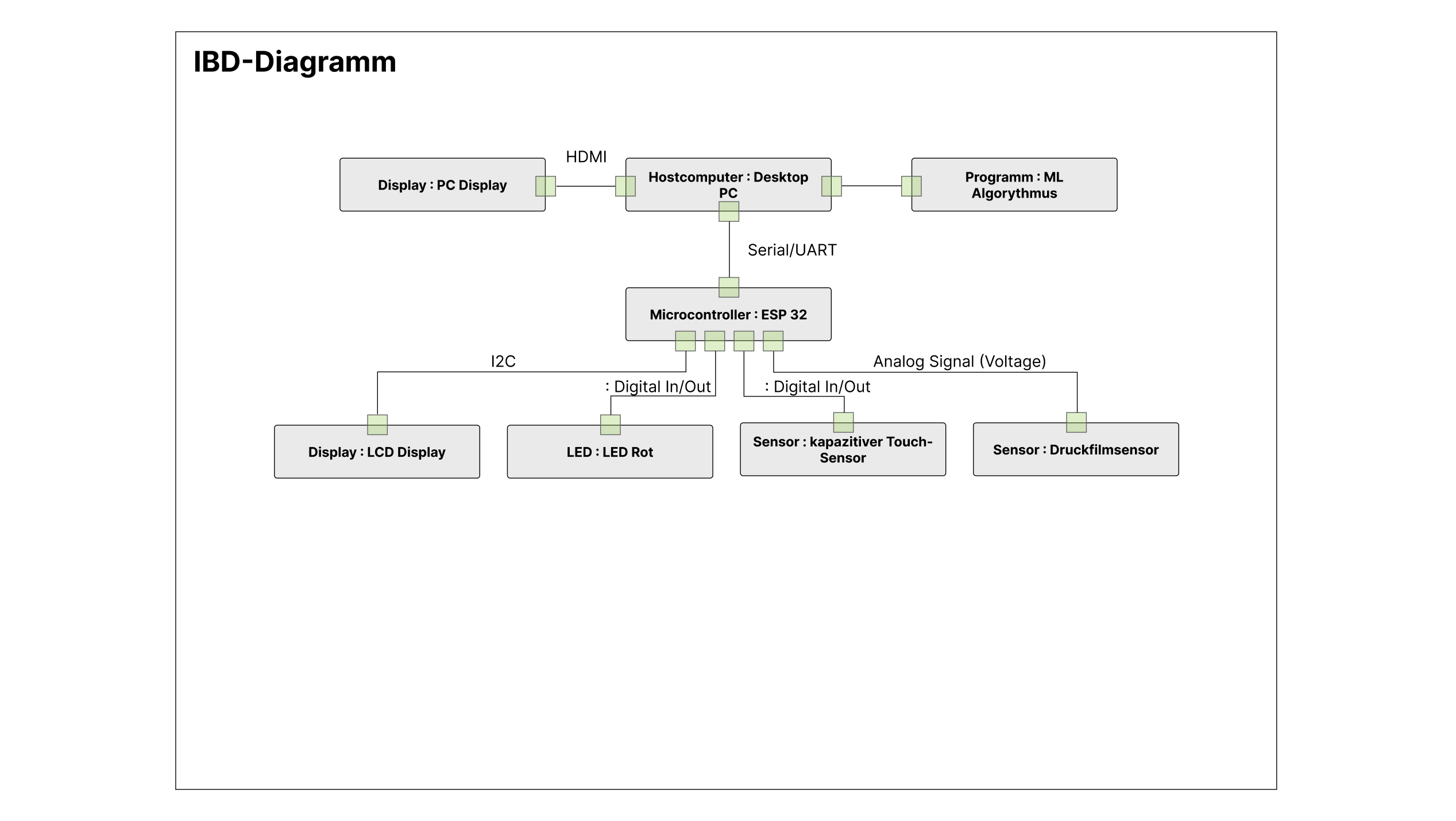
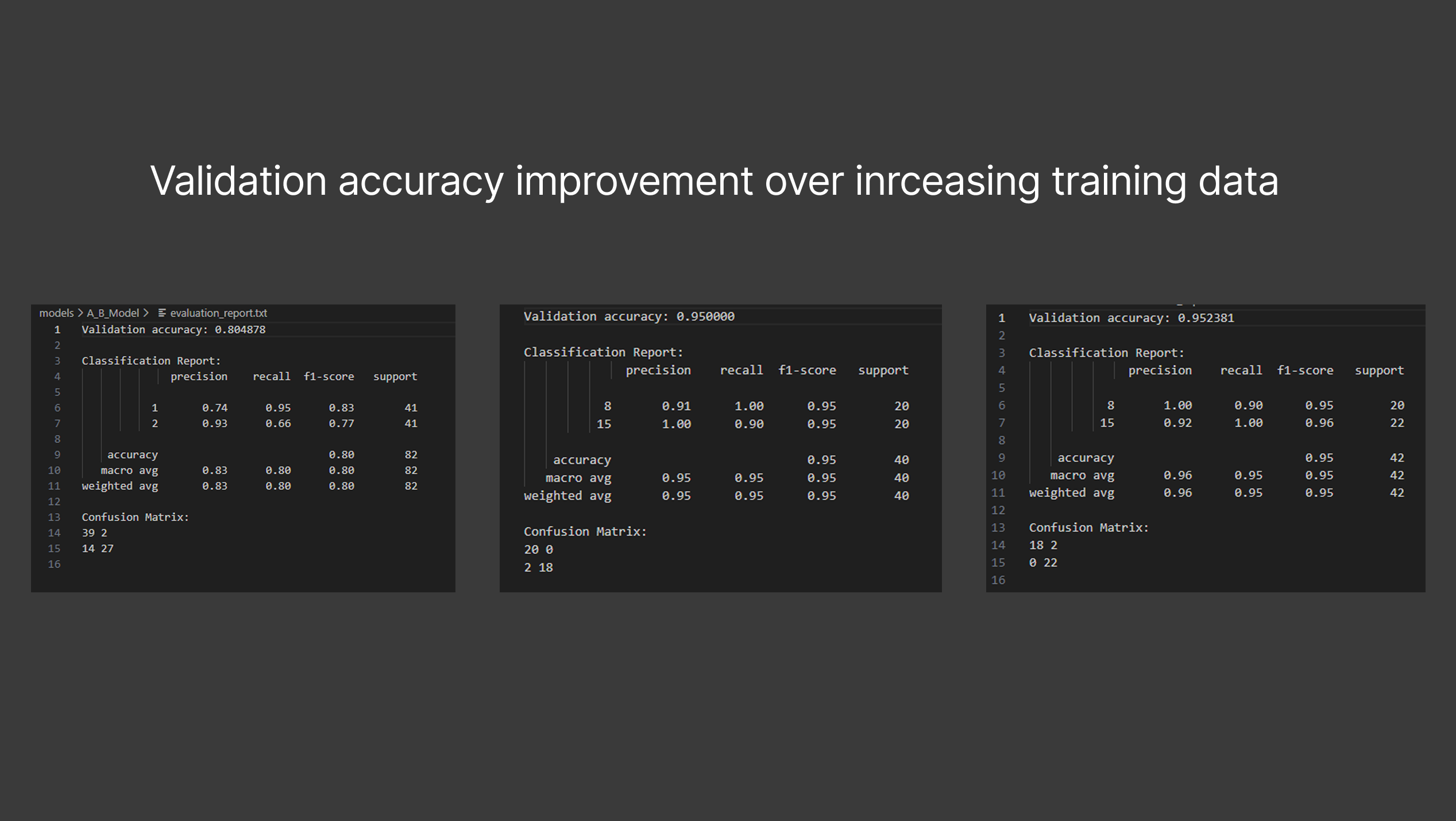
Entwicklung eines Stifts mit integriertem Drucksensor sowie eines Interfaces zur Datenerfassung und -visualisierung. Auf Basis umfangreicher Trainingsdaten wurde ein Modell zur Zeitreihenklassifikation entwickelt, das durch kontextbasierte Nachverarbeitung ergänzt wird und zeigt, dass selbst unter extrem reduzierten Bedingungen eine überraschend hohe Rekonstruktionsfähigkeit erreicht werden kann.
Showroom




Body Mirroring

Interaktive Zeichenmaschine mit Vision-basiertem Body Tracking
Überblick
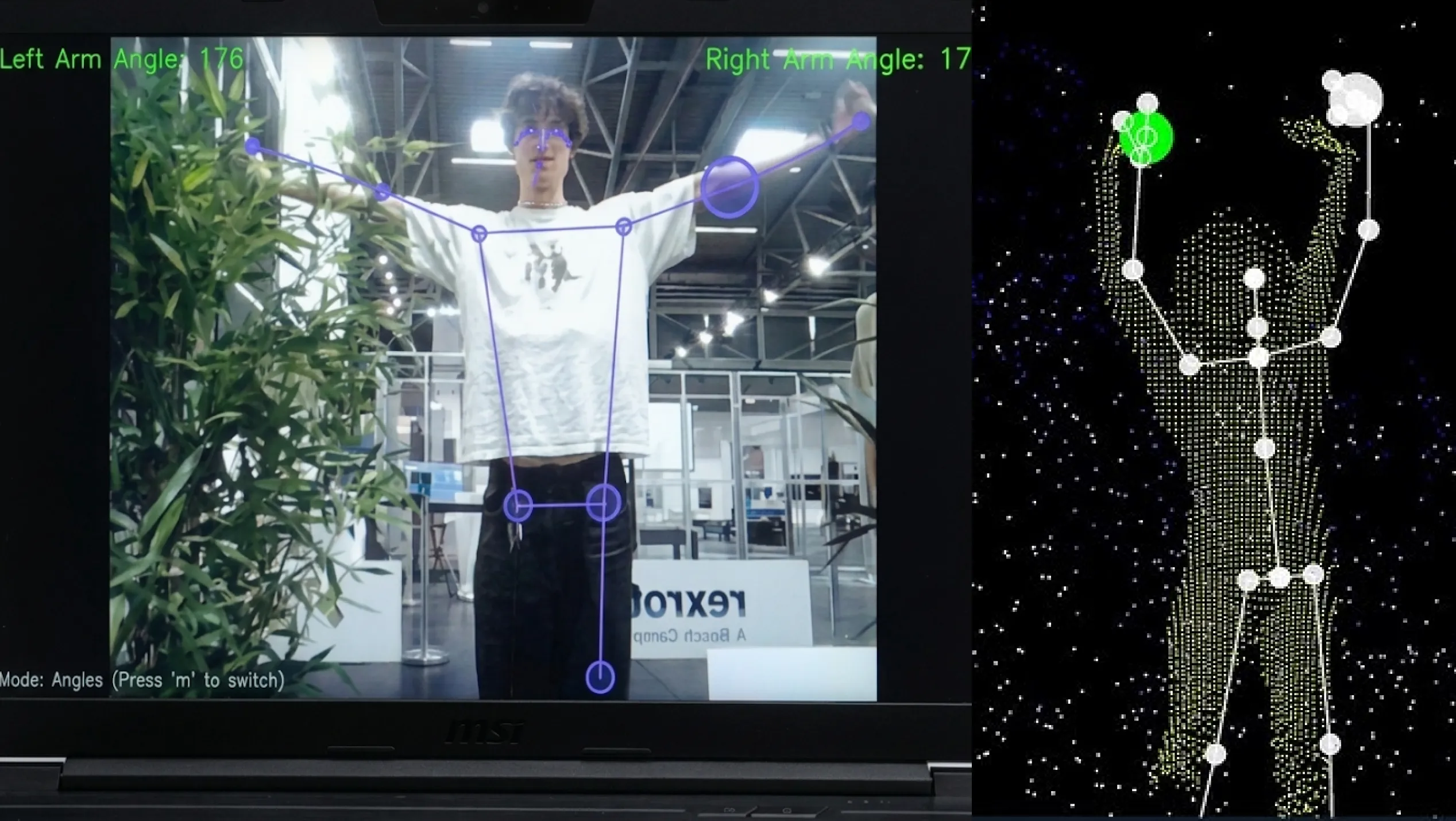
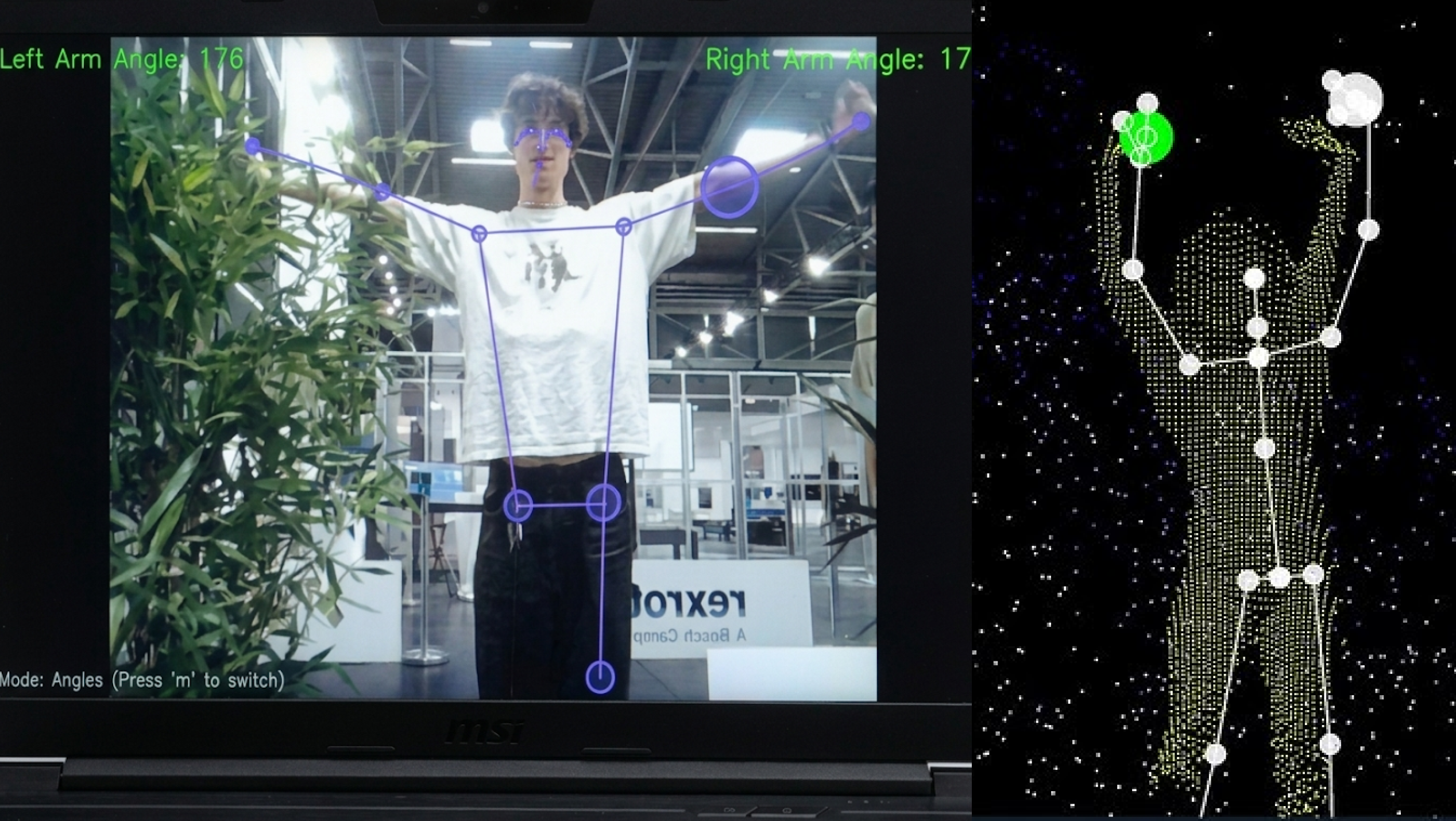
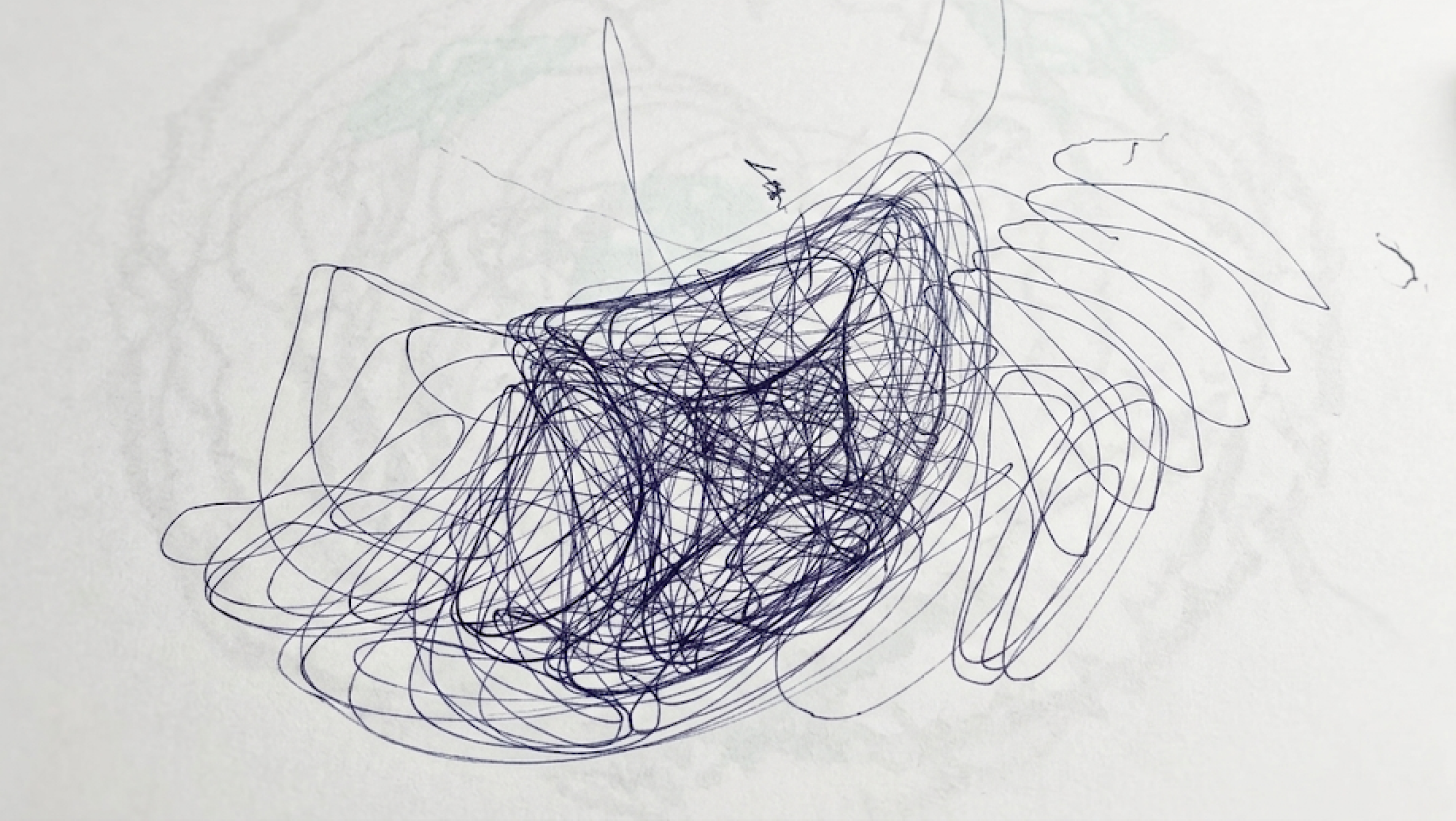
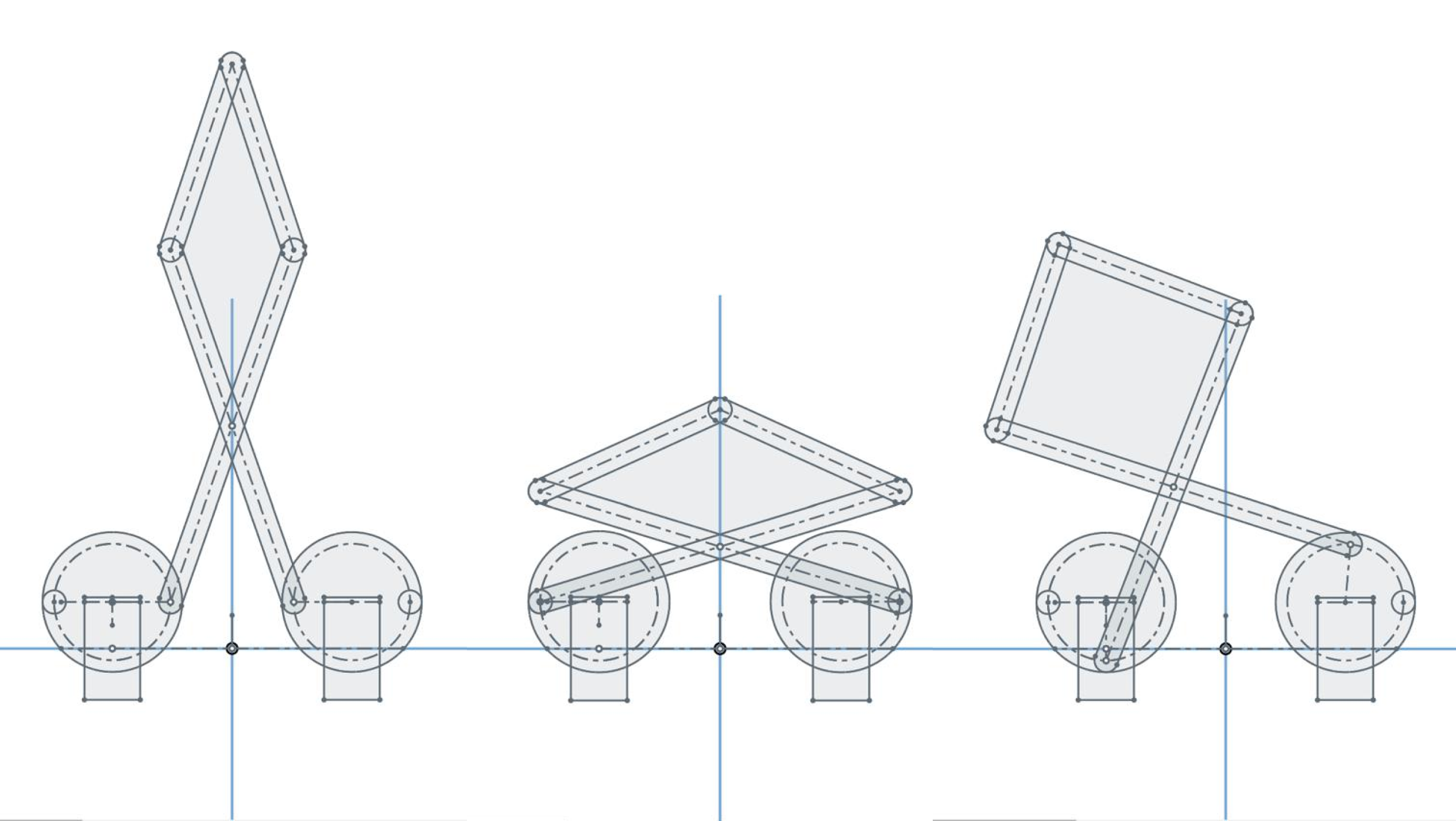
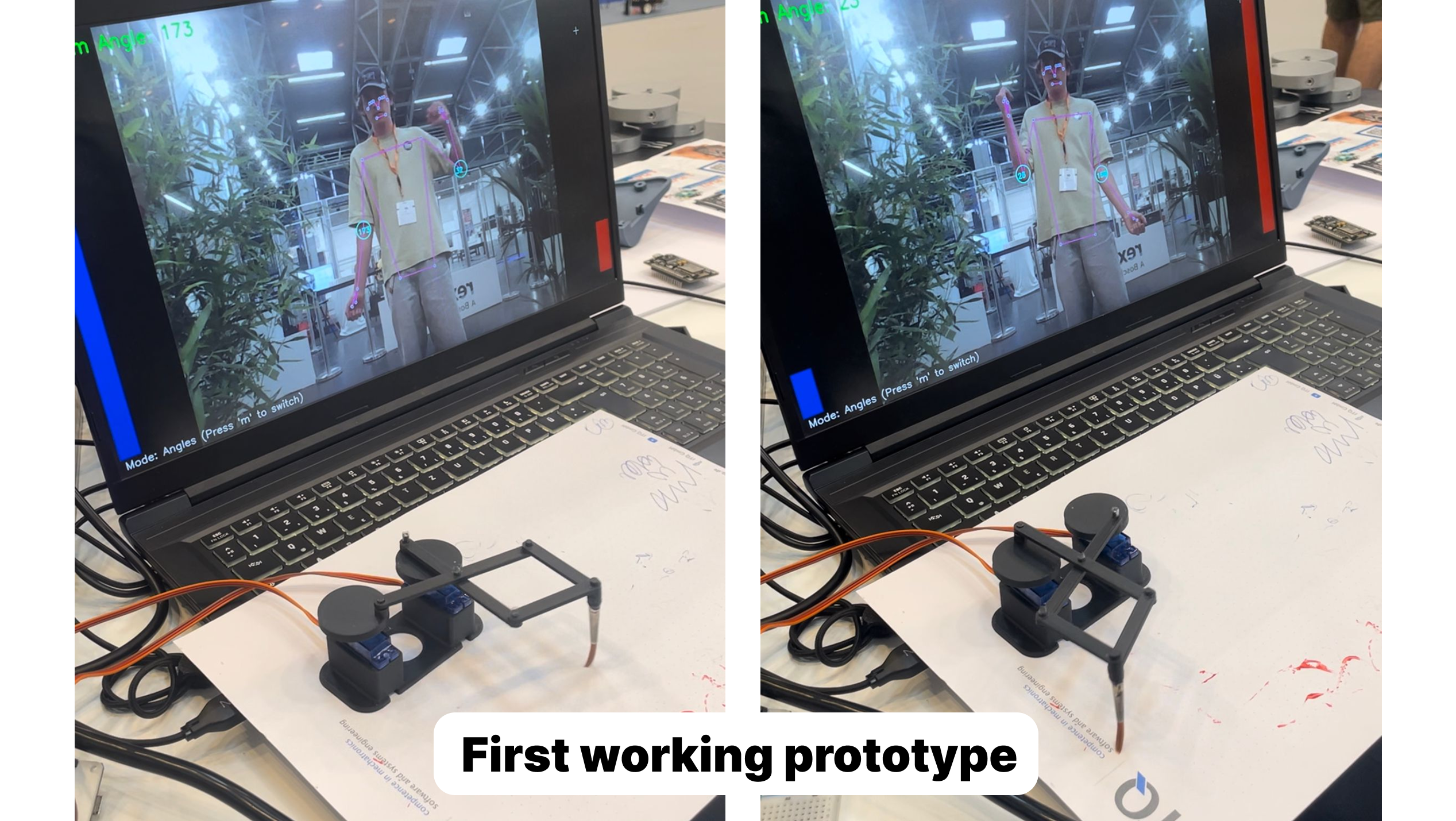
Body Mirroring ist eine interaktive Kunstinstallation, die Körperbewegungen in Echtzeit erfasst und in geometrische Zeichnungen übersetzt. Entstanden im Rahmen eines Ausstellungsformats an der Schnittstelle von Gestaltung und Technik, bei dem Besucher selbst zum Akteur der Bildgenerierung werden.
Herausforderung
Ziel war es, ein System zu entwickeln, das technische Komplexität (Computer Vision, Bewegungsübertragung, Mechanik) mit intuitiver, unmittelbarer Interaktion verbindet. Dabei mussten sowohl robuste Bewegungserkennung als auch eine verständliche visuelle Übersetzung der Bewegungen gestaltet werden.
Konzept & Umsetzung
Entwicklung eines Systems aus Webcam-basierter Körpererkennung (Computer Vision) und einer mechatronischen Zeichenmaschine. Die Bewegungen der linken und rechten Körperhälfte werden in Echtzeit interpretiert und auf zwei Motorachsen übertragen, die über einen Scherenmechanismus geometrische Formen erzeugen. Der iterative Designprozess umfasste Formstudien, Prototyping und Usability-Tests, um sowohl Funktionalität als auch Ausstellungserlebnis zu optimieren.
Showroom



Scoopy

Modularer Roboter zur Mensch-Maschine-Interaktion
Überblick
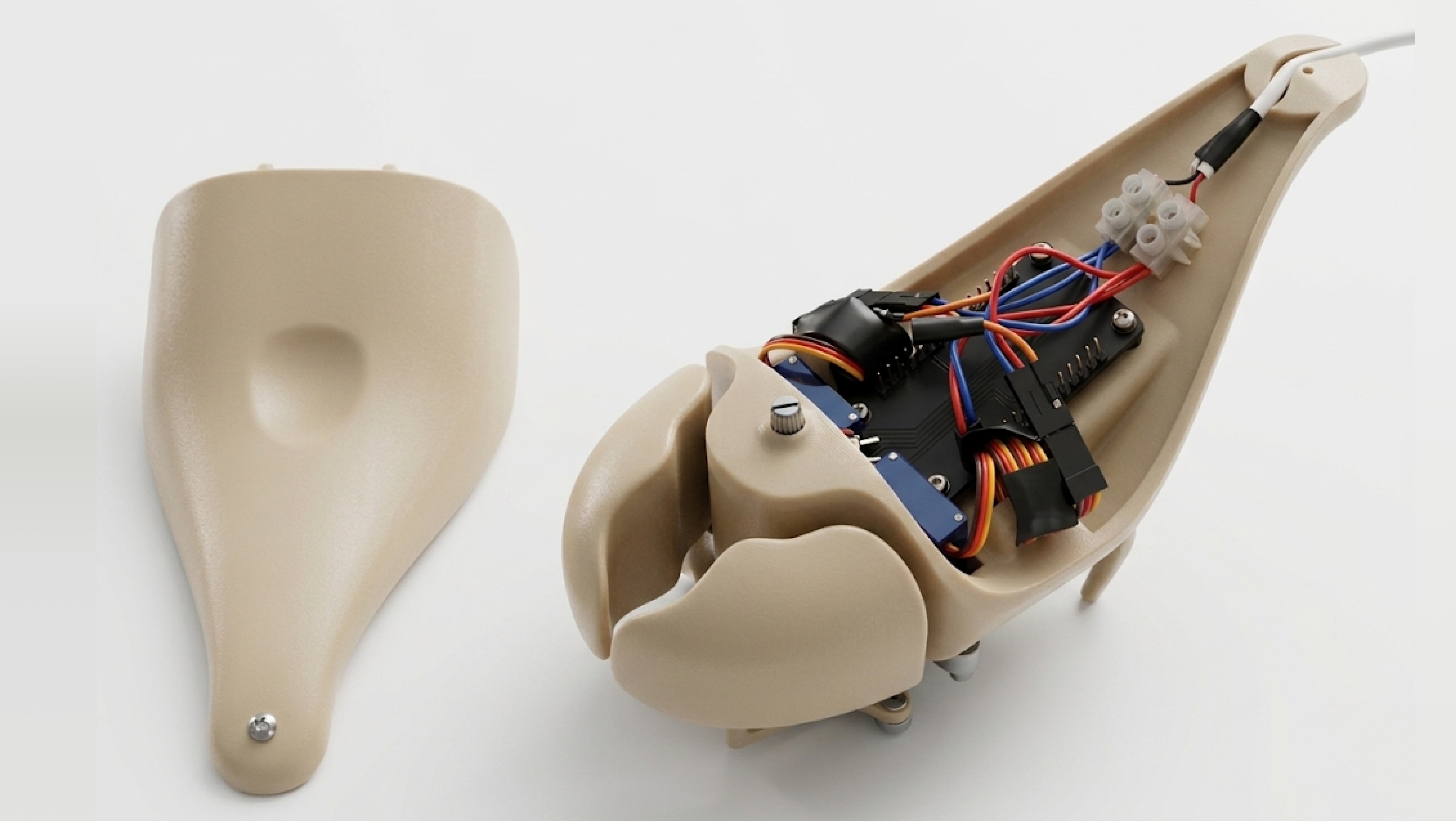
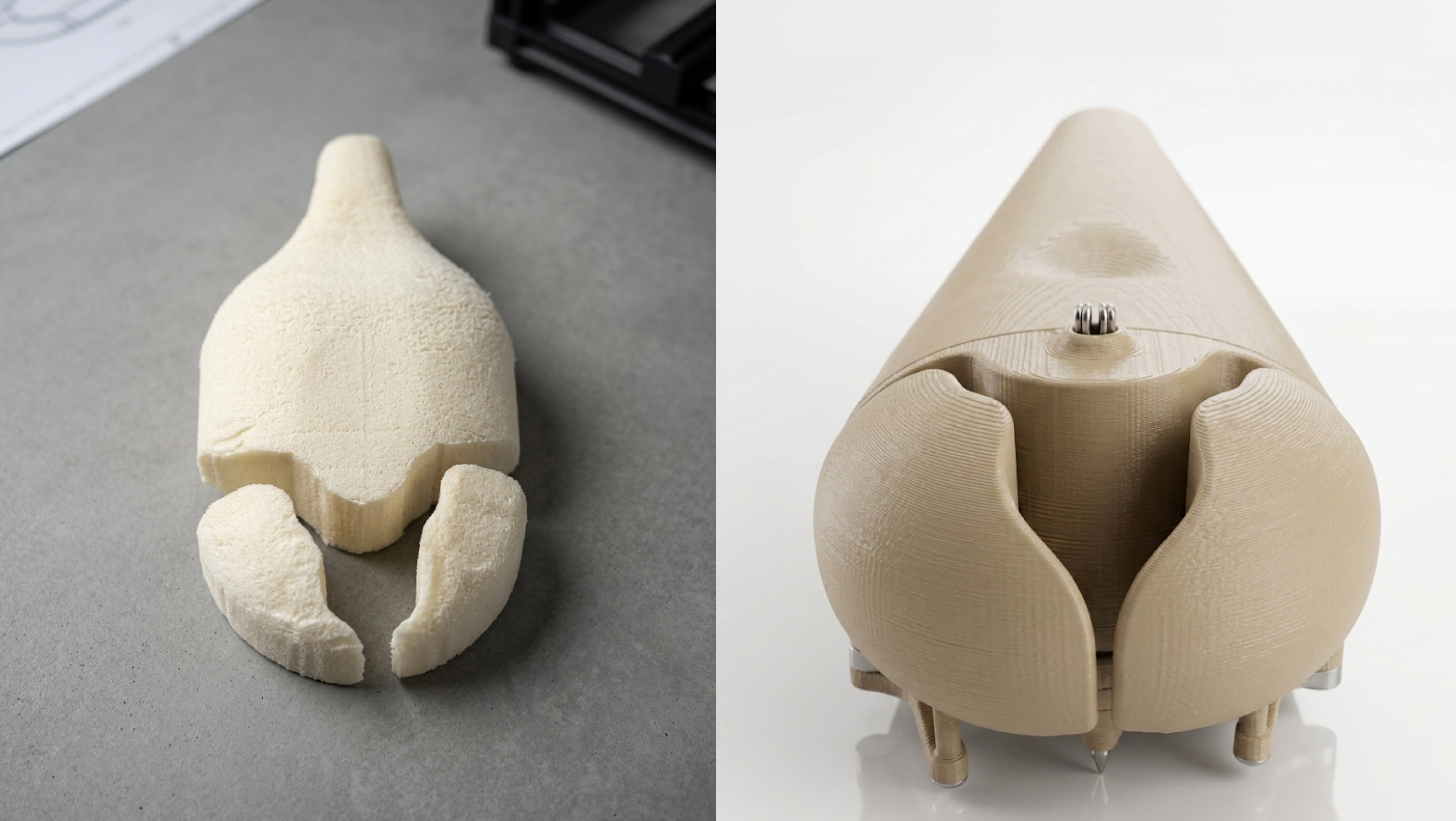
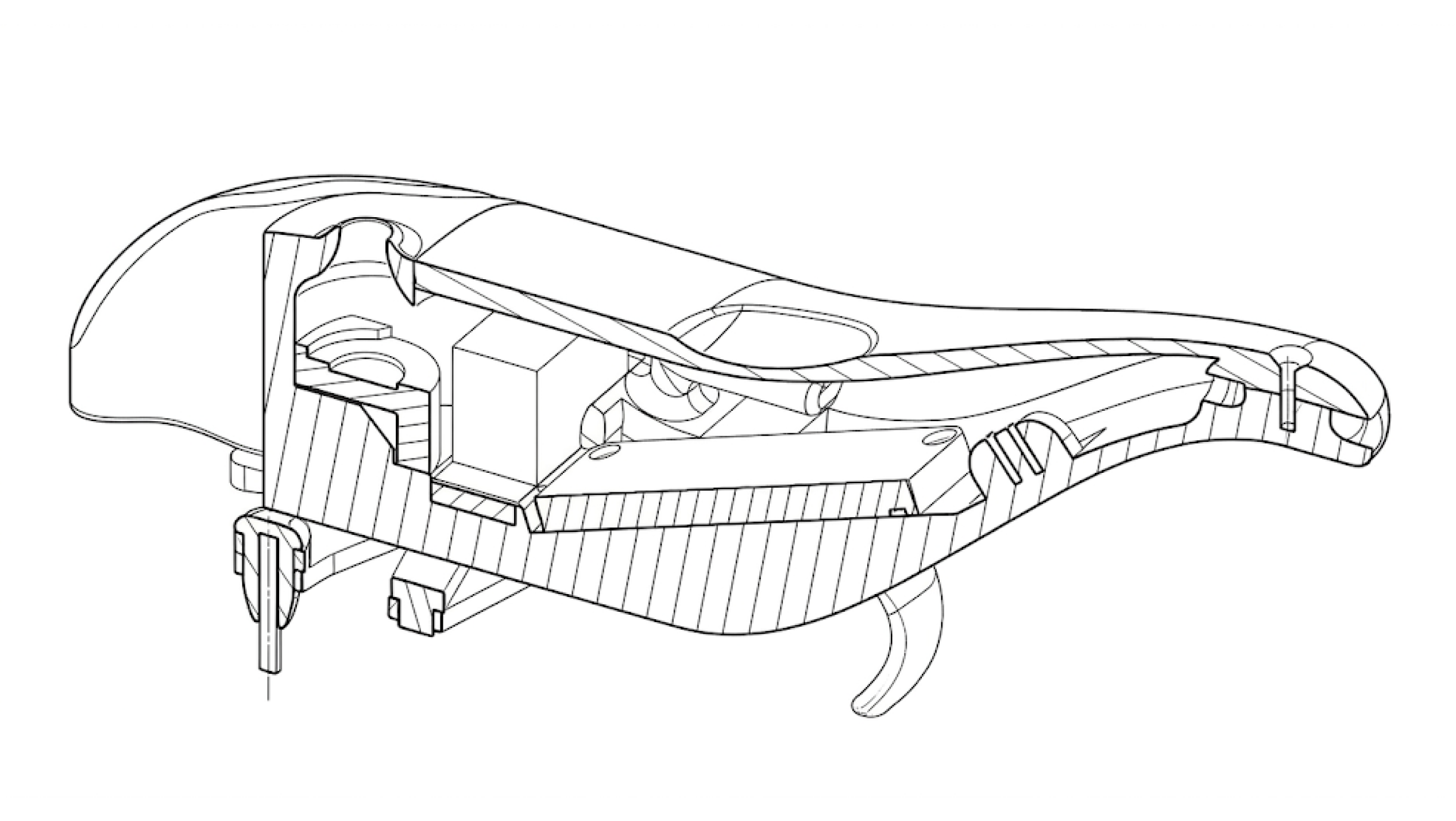
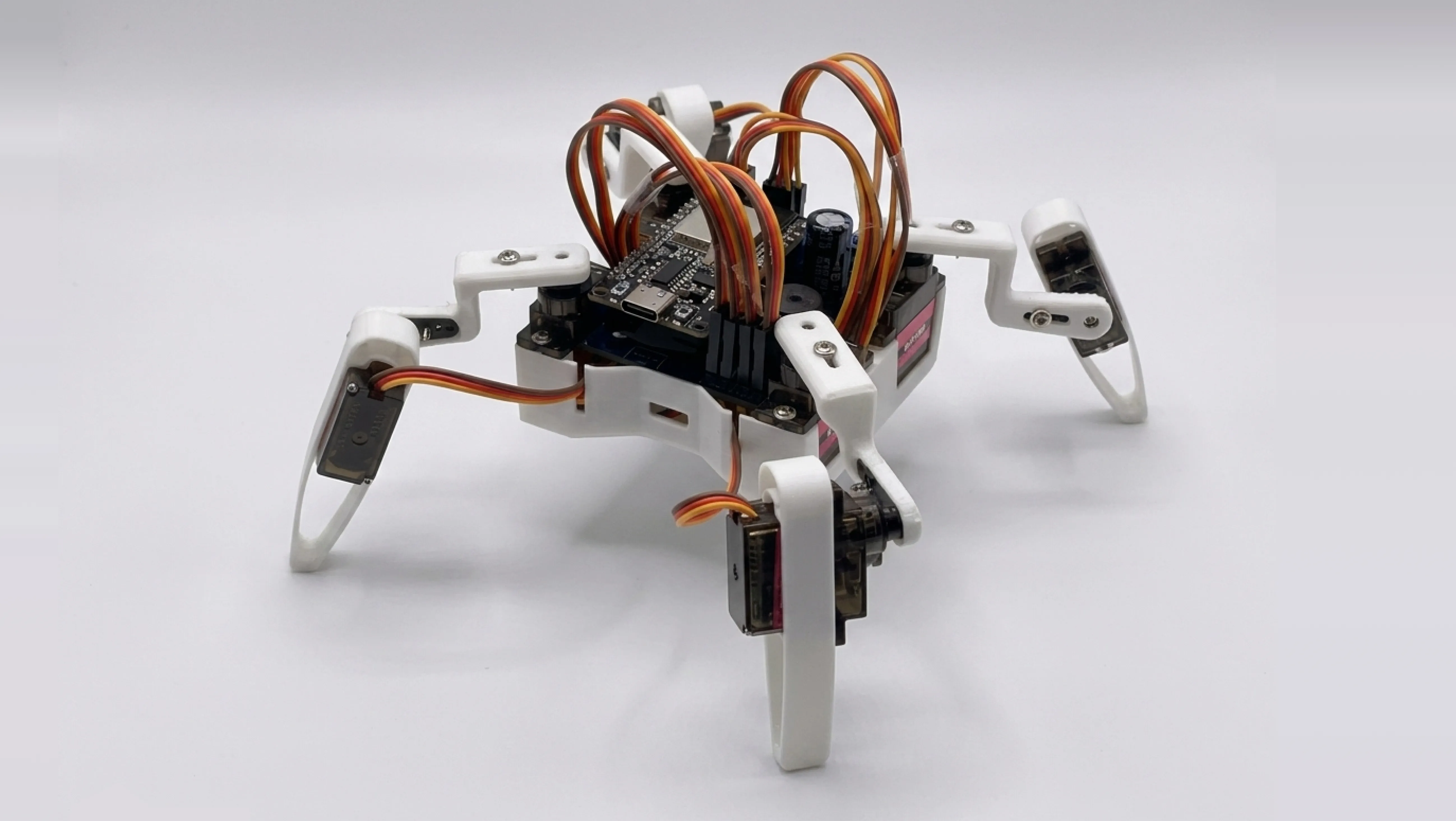
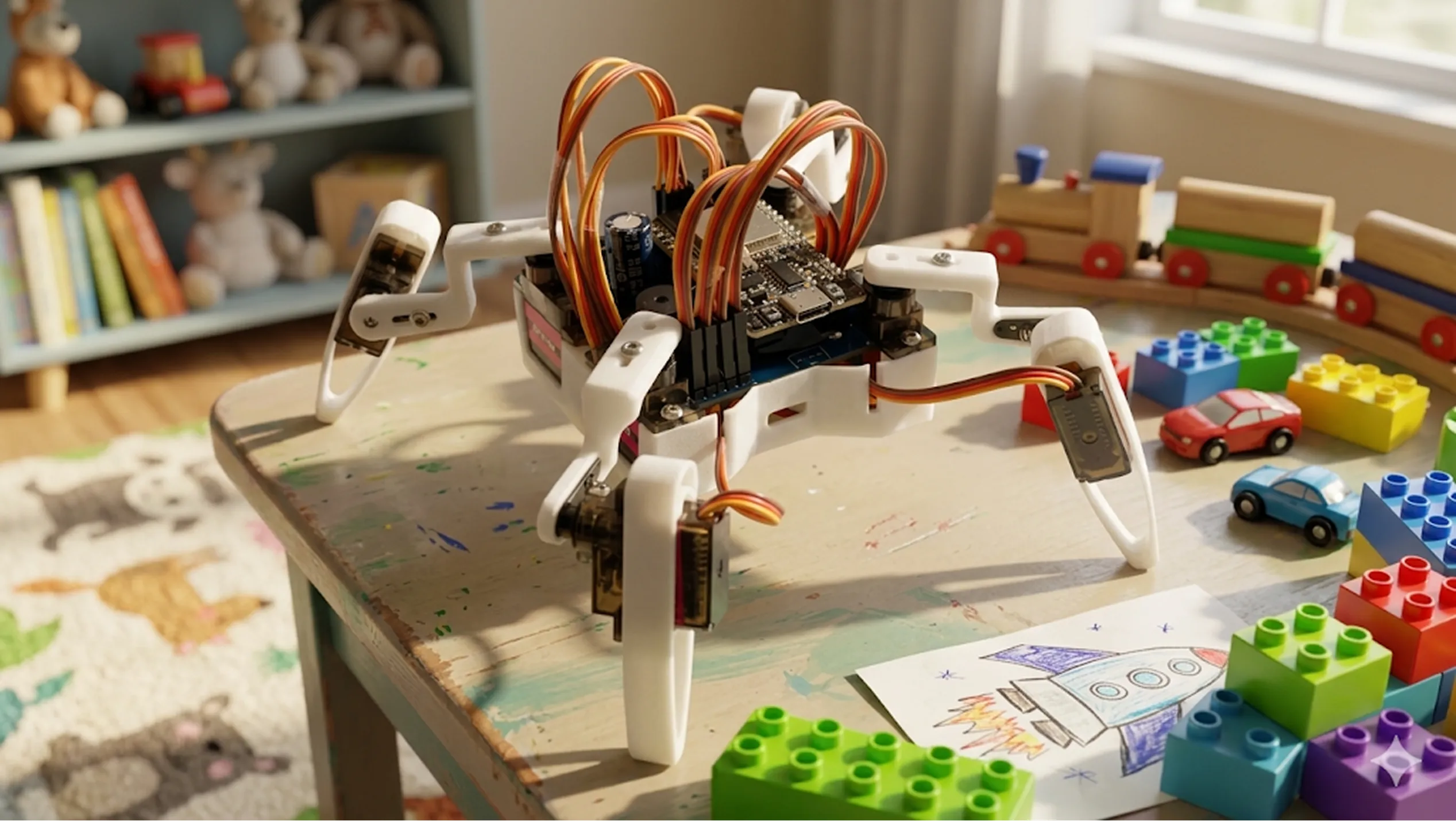
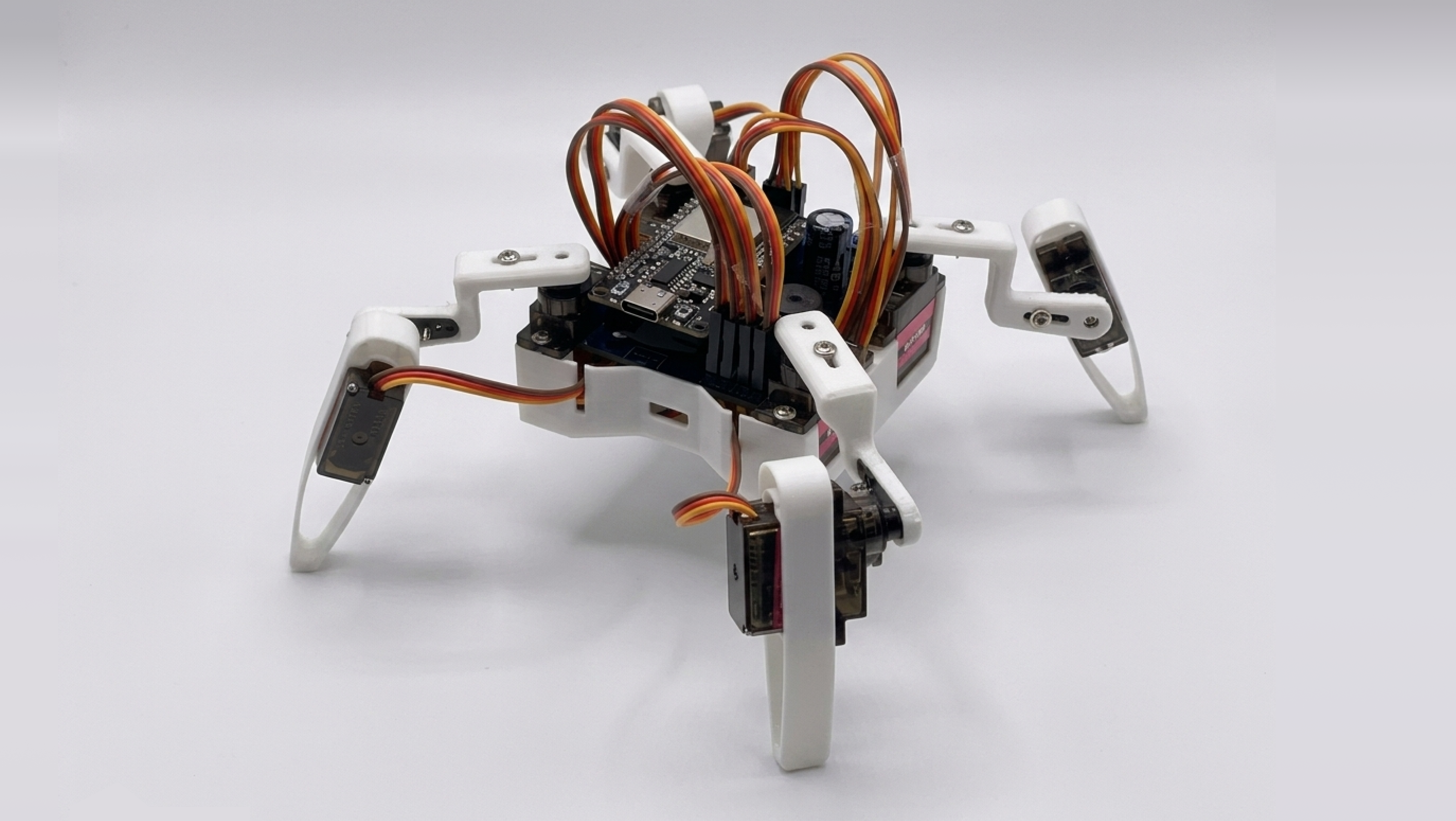
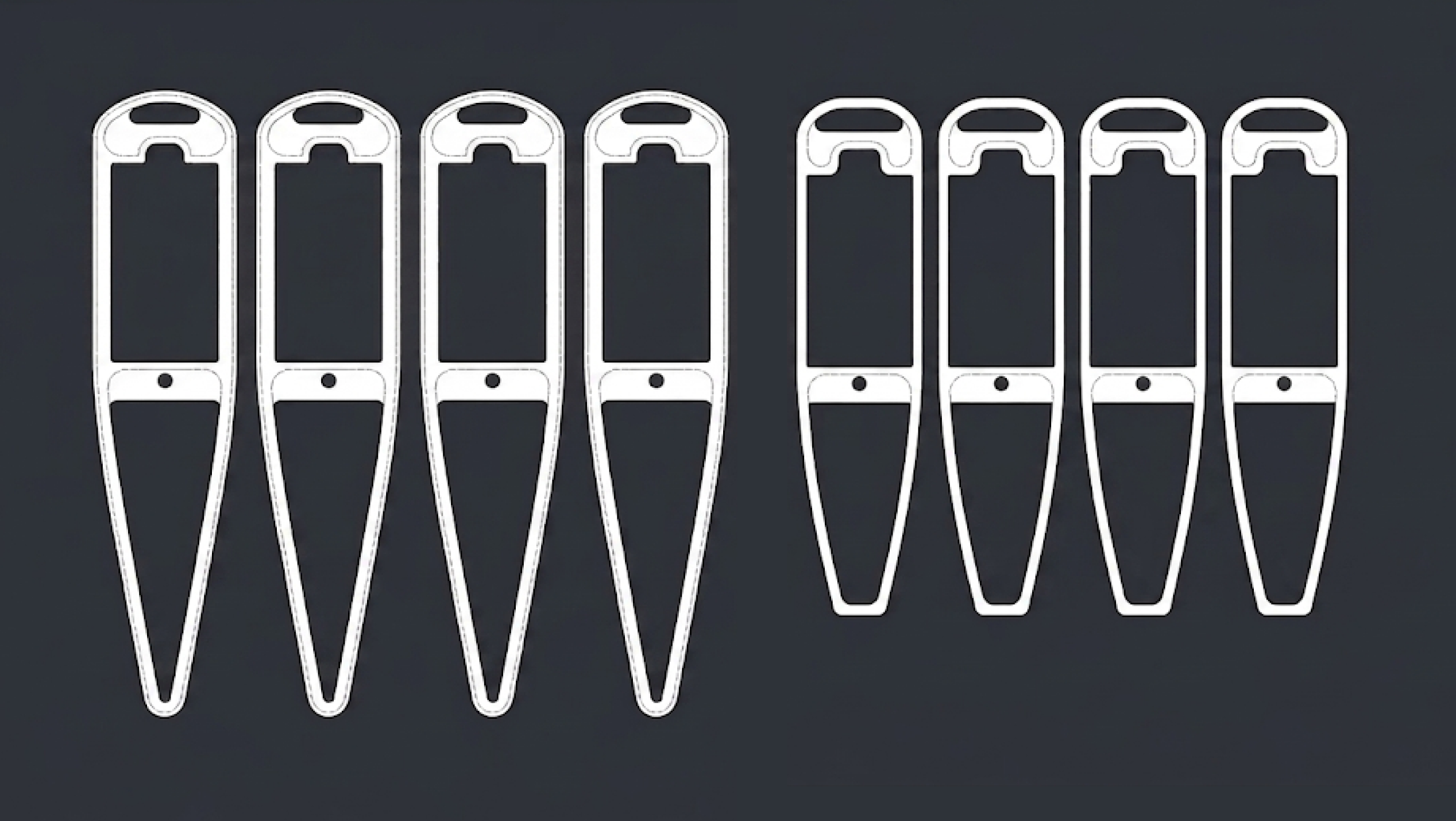
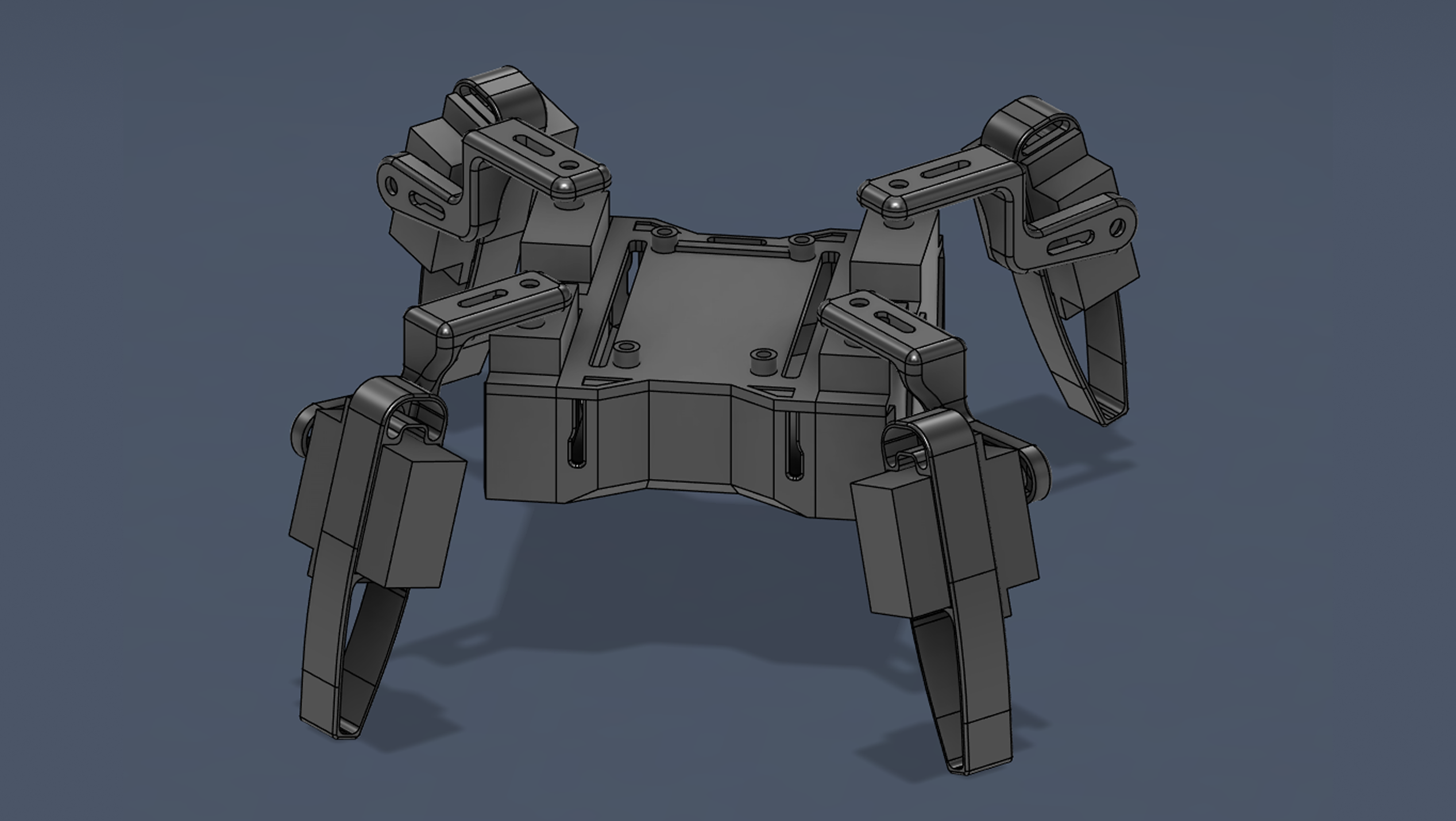
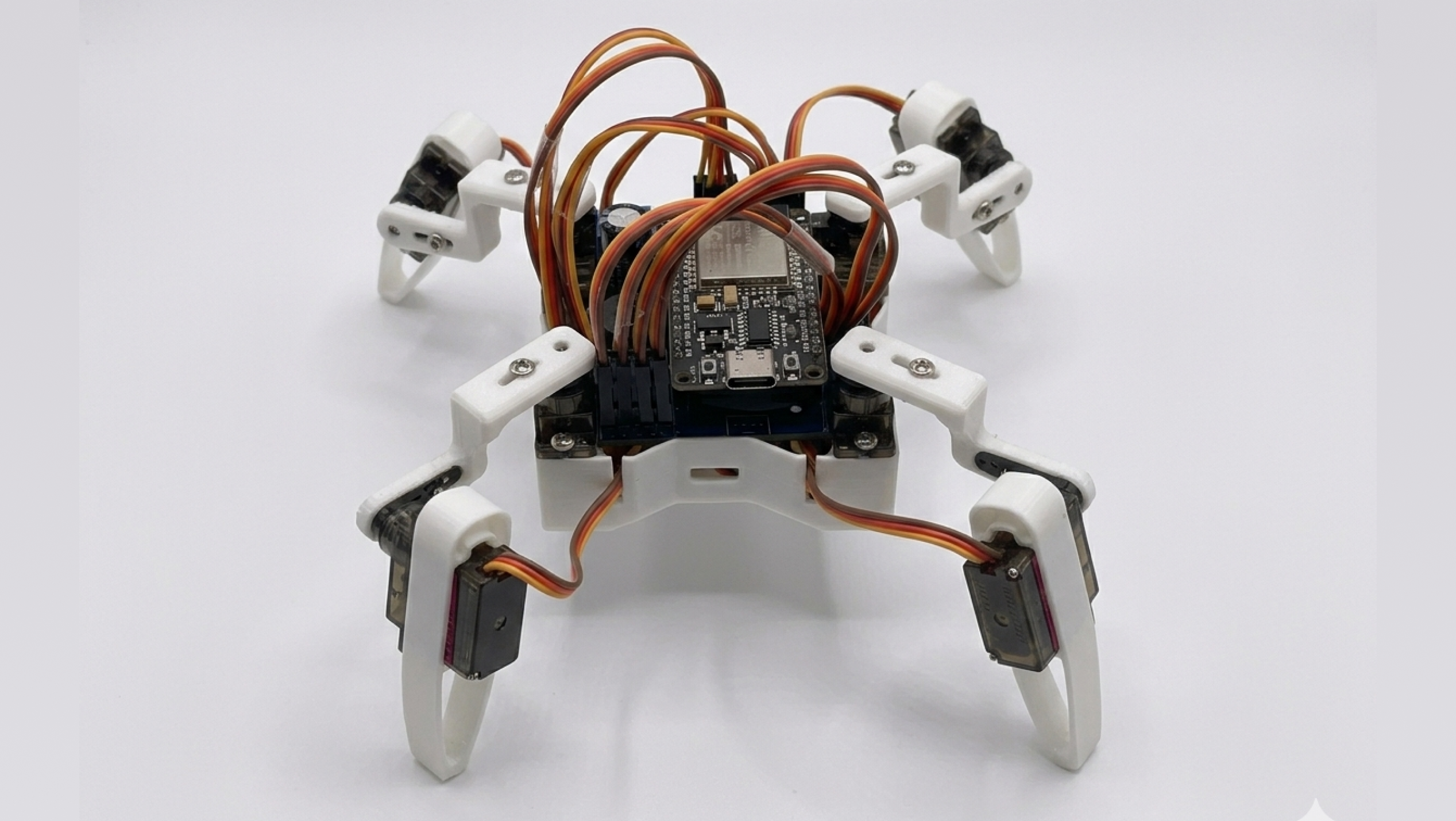
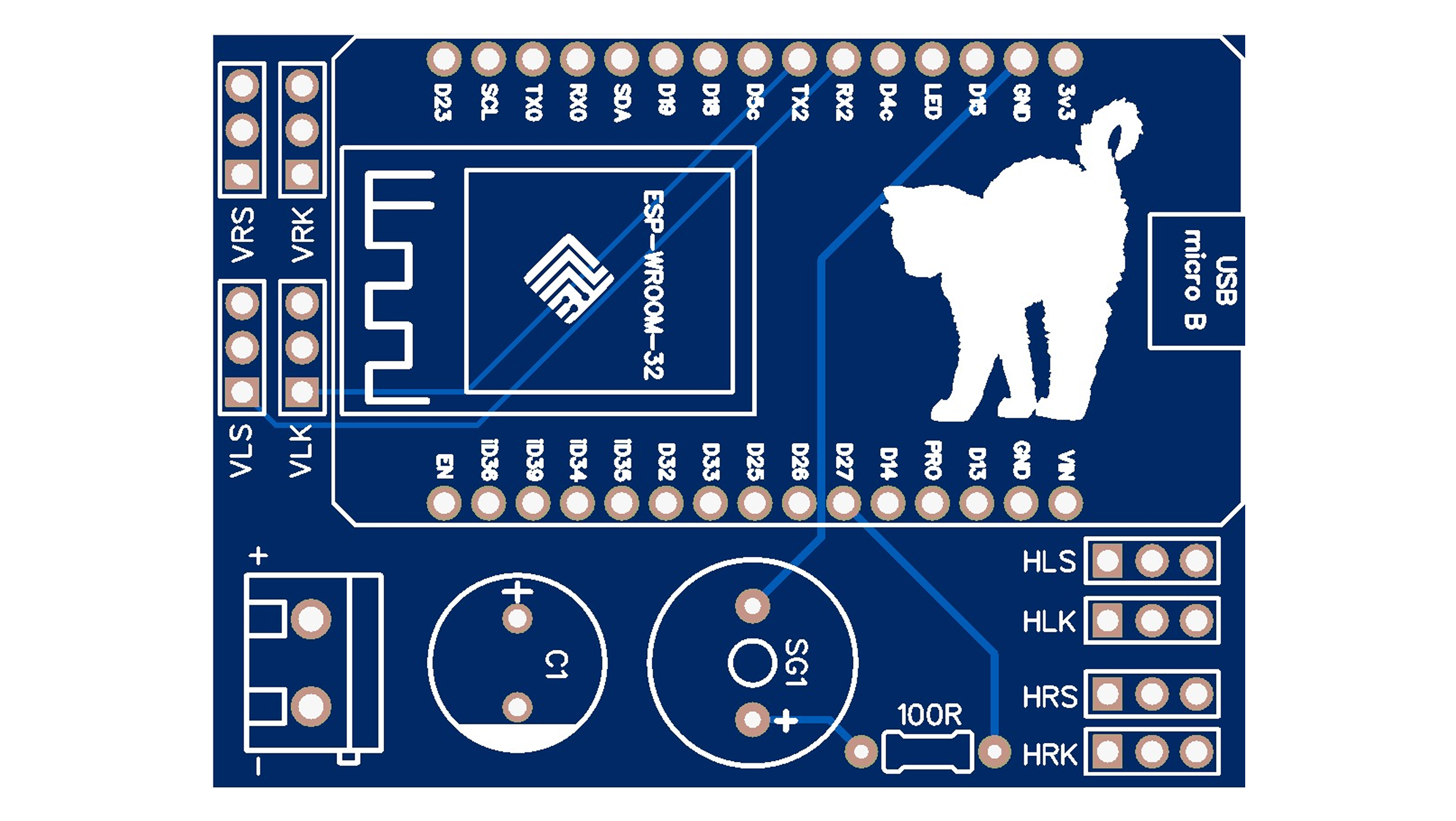
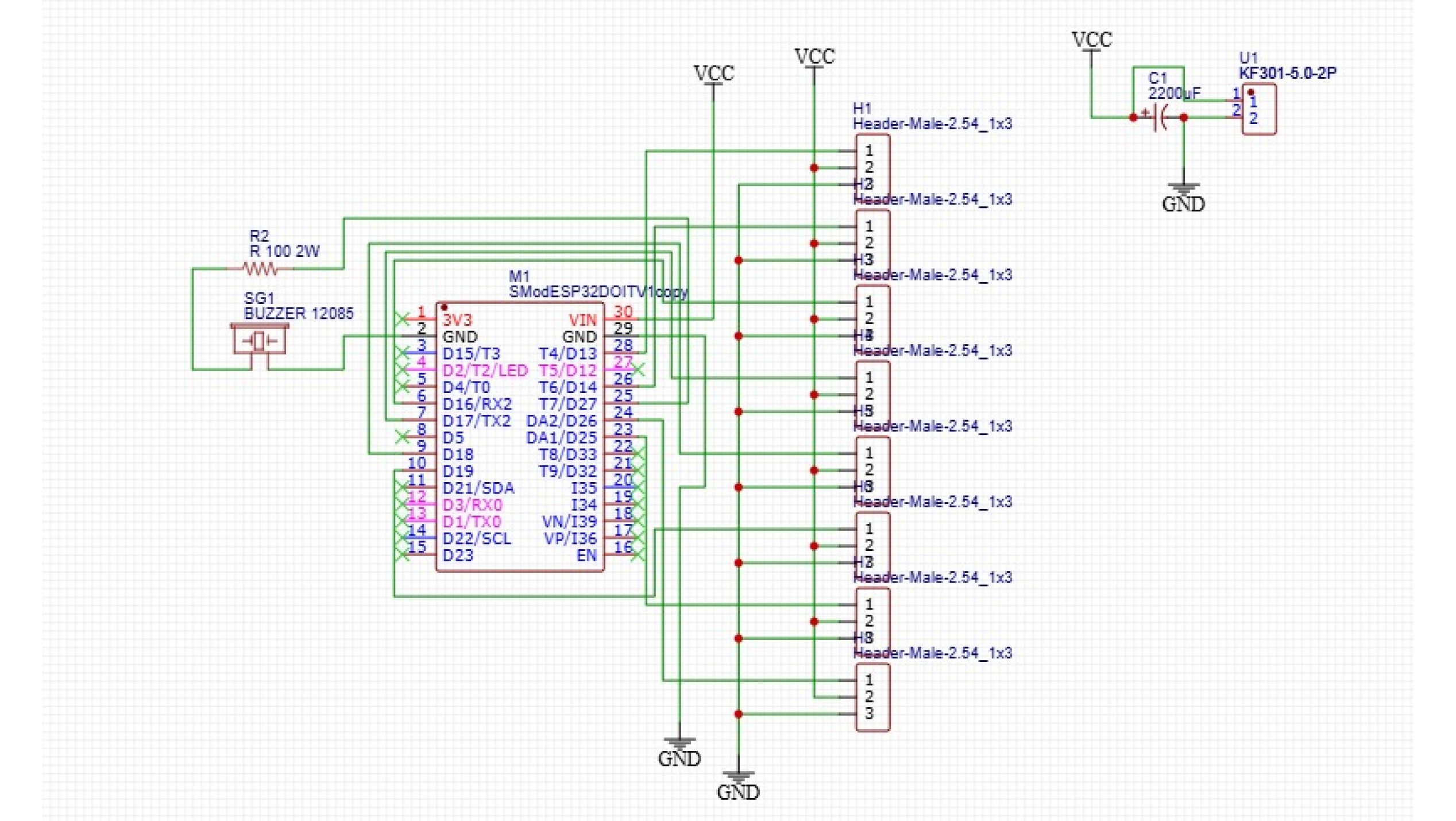
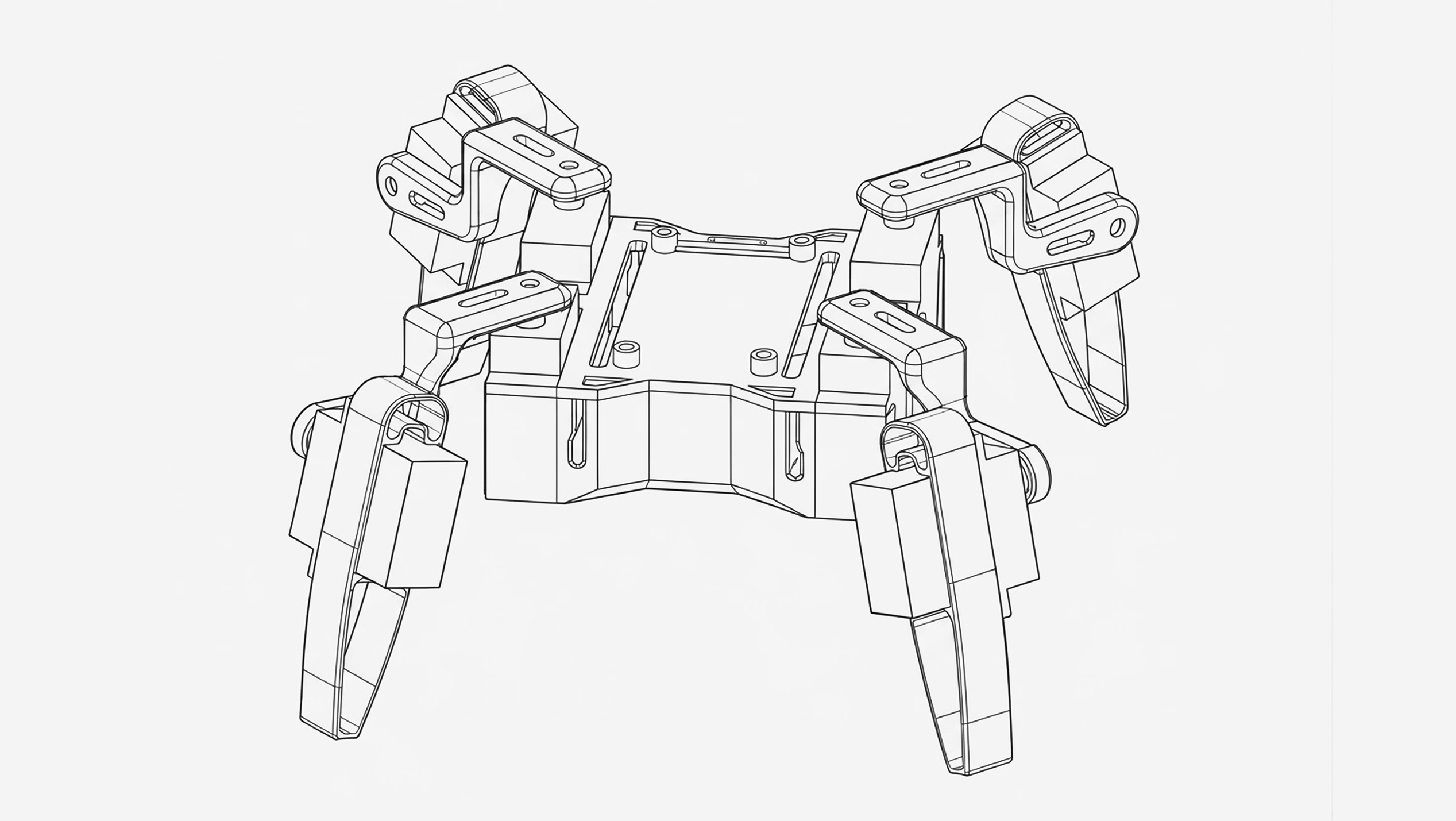
Scoopy ist ein servoangetriebener, vierbeiniger Roboter mit eigener Steuerung und WLAN-Anbindung. Im Rahmen des Studienprojekts wurde er als experimentelles System entwickelt, das funktionale Fortbewegung mit zugänglicher, interaktiver Gestaltung verbindet.
Herausforderung
Ziel war es, neben der technischen Umsetzung eines laufenden Roboters gezielt Hemmschwellen im Umgang mit Robotik zu untersuchen und zu reduzieren. Dabei galt es, funktionale Bewegung und vertrauensförderndes Verhalten sinnvoll zu kombinieren.
Konzept & Umsetzung
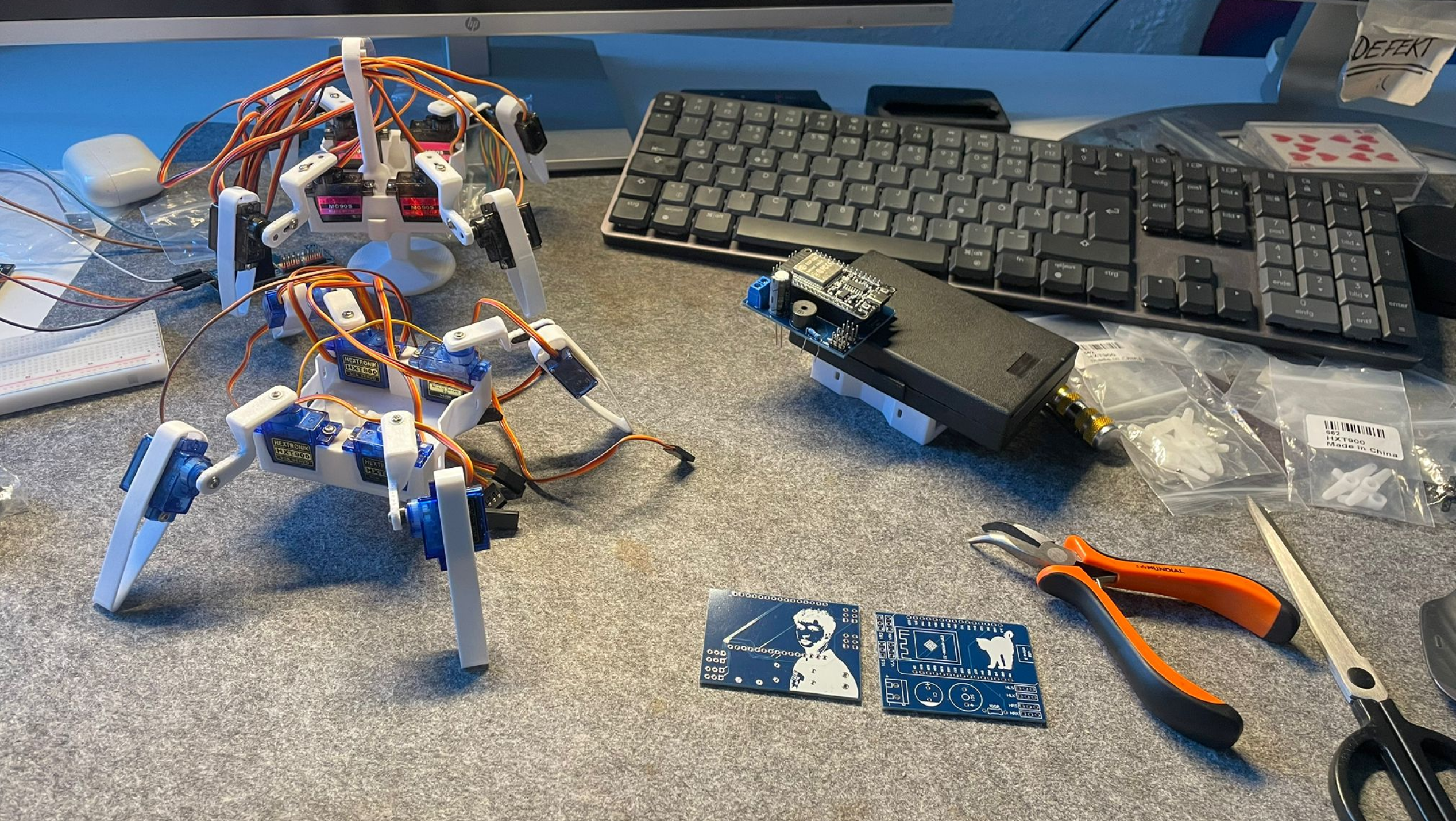
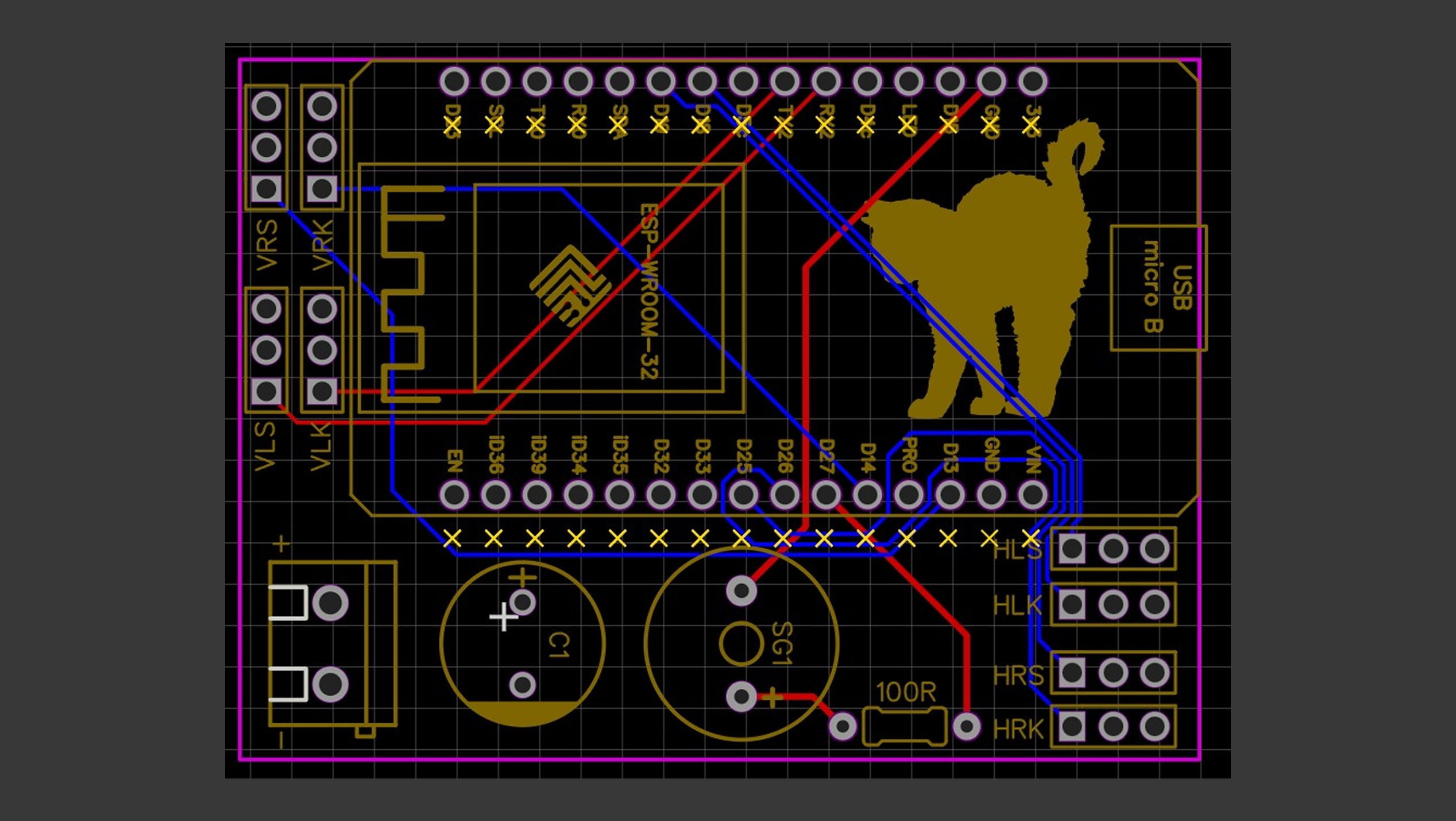
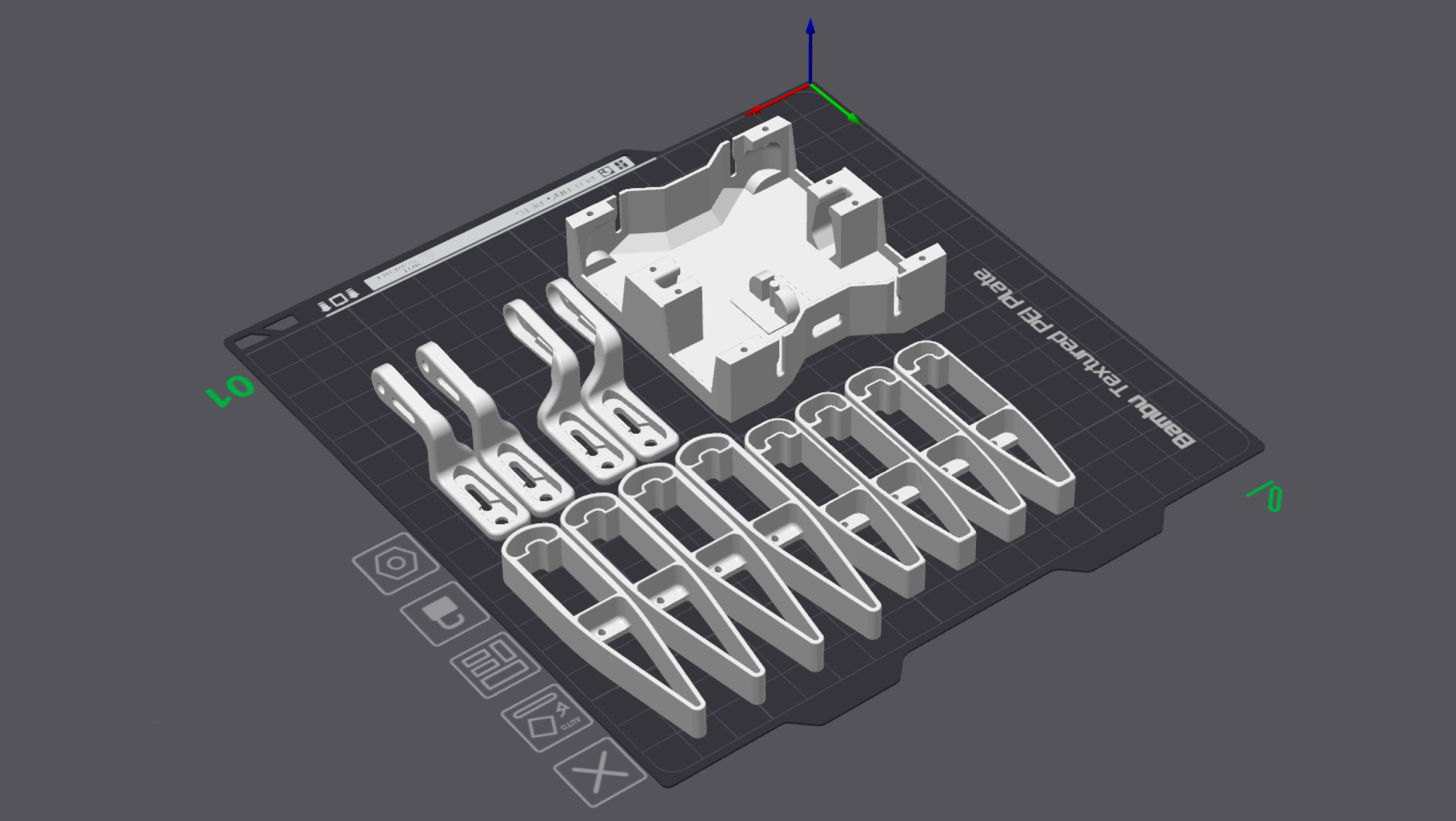
Entwicklung eines modularen Robotersystems inklusive CAD-Konstruktion, eigenem PCB-Design und Programmierung der Steuerung. Durch einen Behavior-Design-Ansatz werden Bewegungen, Gesten und Sounds gezielt eingesetzt, um Interaktion intuitiv zu gestalten und Vertrauen in das System aufzubauen.
Showroom


Haptophone


Interaktive Installation zur Umwandlung von Vibrationen in visuelle und auditive Experience
Überblick
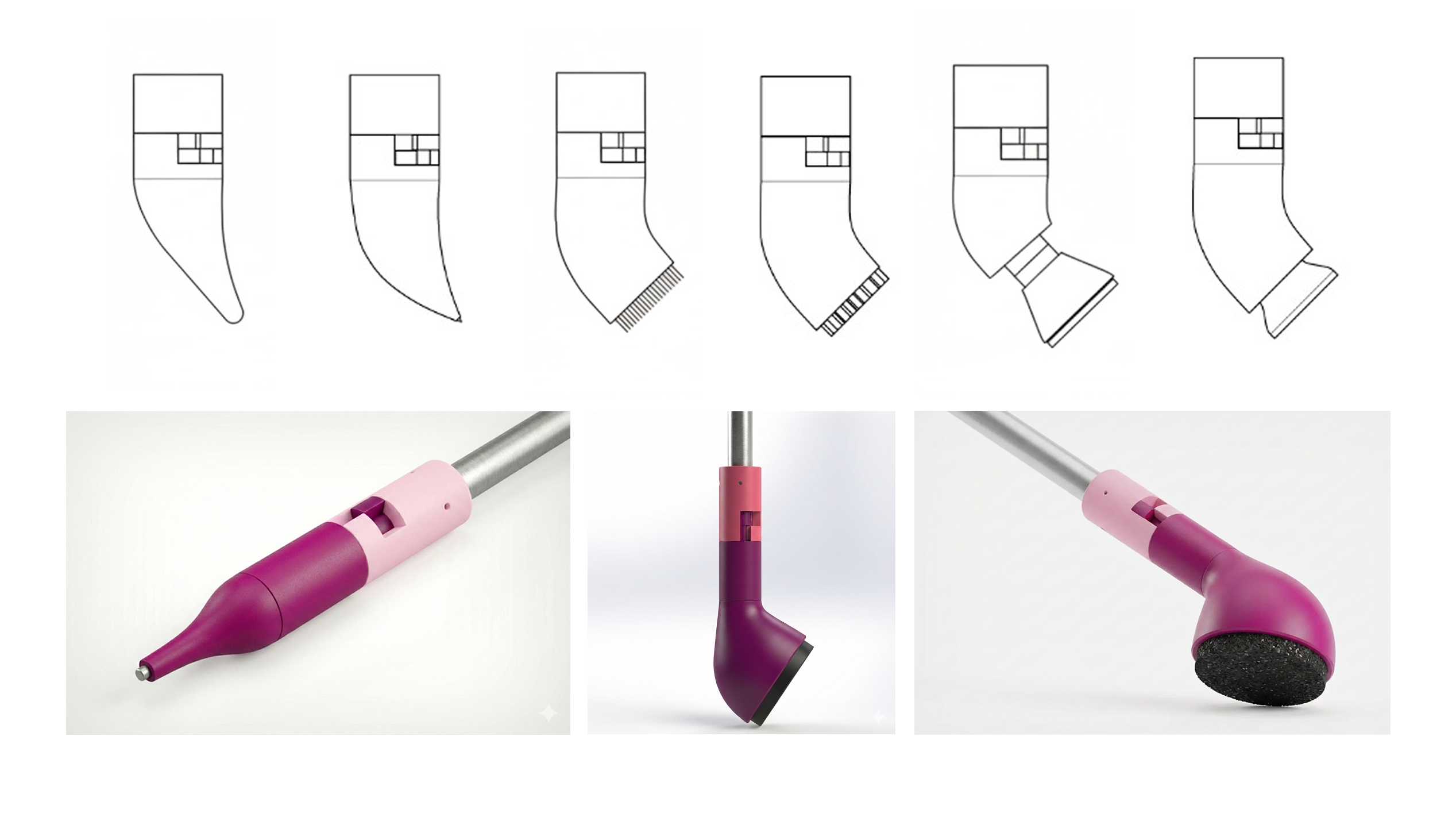
Haptophon ist ein experimentelles, Modulares Tool zur künstlerischen Erkundung von Oberflächen und Räumen. Über Bewegung, Klang und Echtzeitvisualisierung entsteht eine multisensorische Erfahrung zwischen physischem und digitalem Raum.
Herausforderung
Die Herausforderung lag darin, technische Systeme und intuitive Interaktion miteinander zu verbinden. Besonders wichtig war dabei ein spielerischer Zugang, der trotz komplexer Audio- und Visualisierungsprozesse offen und direkt erfahrbar bleibt.
Konzept & Umsetzung
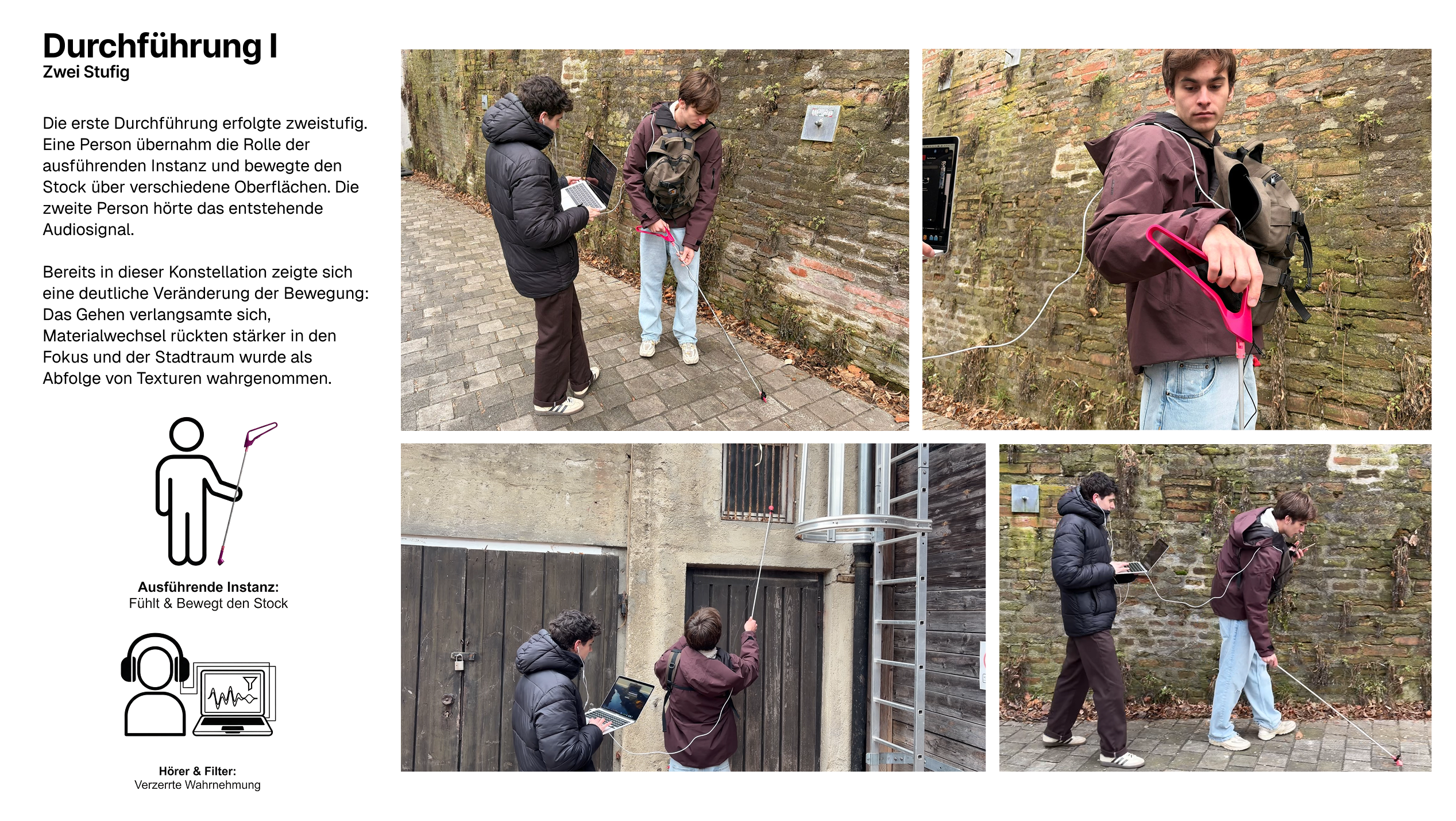
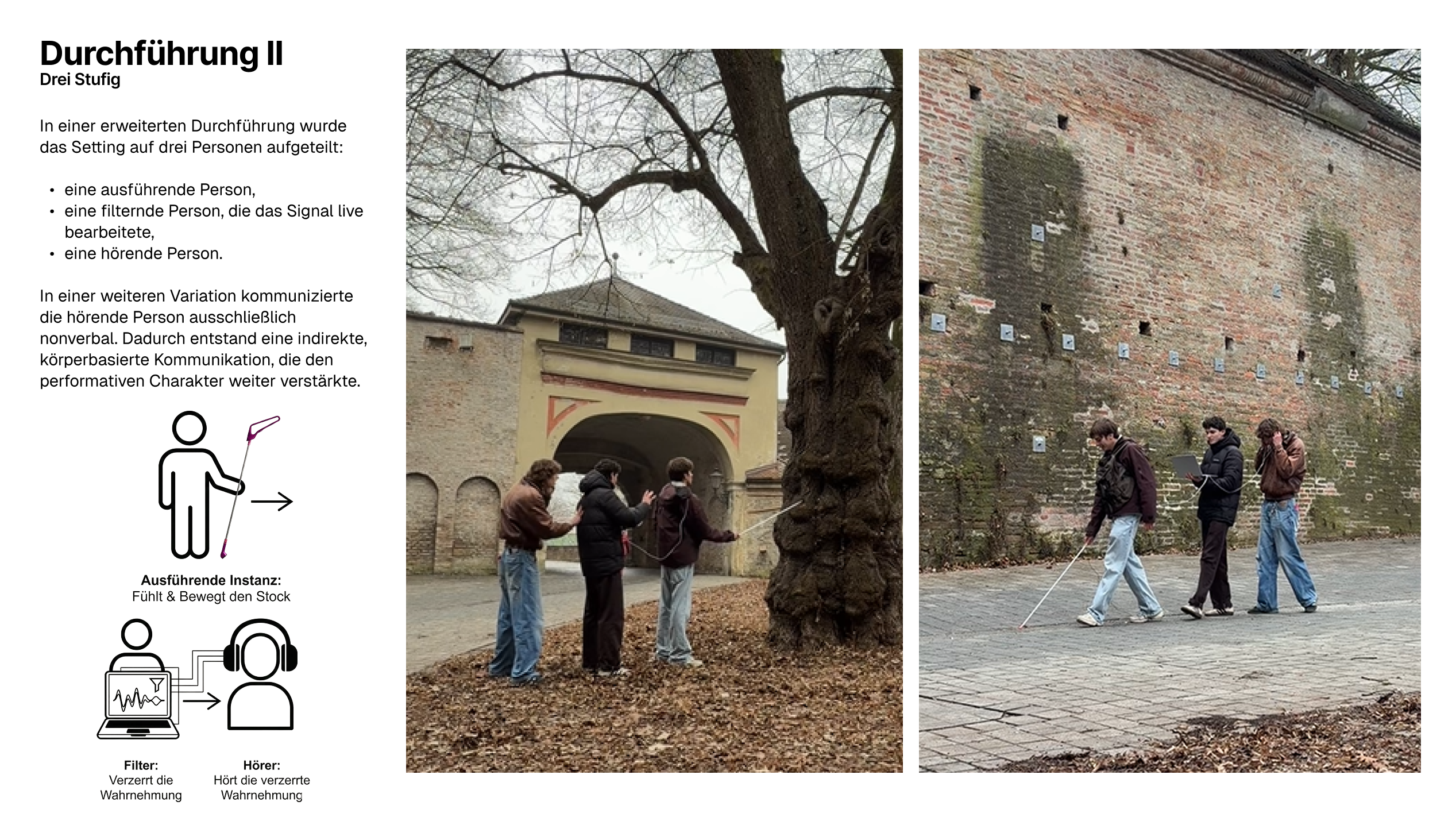
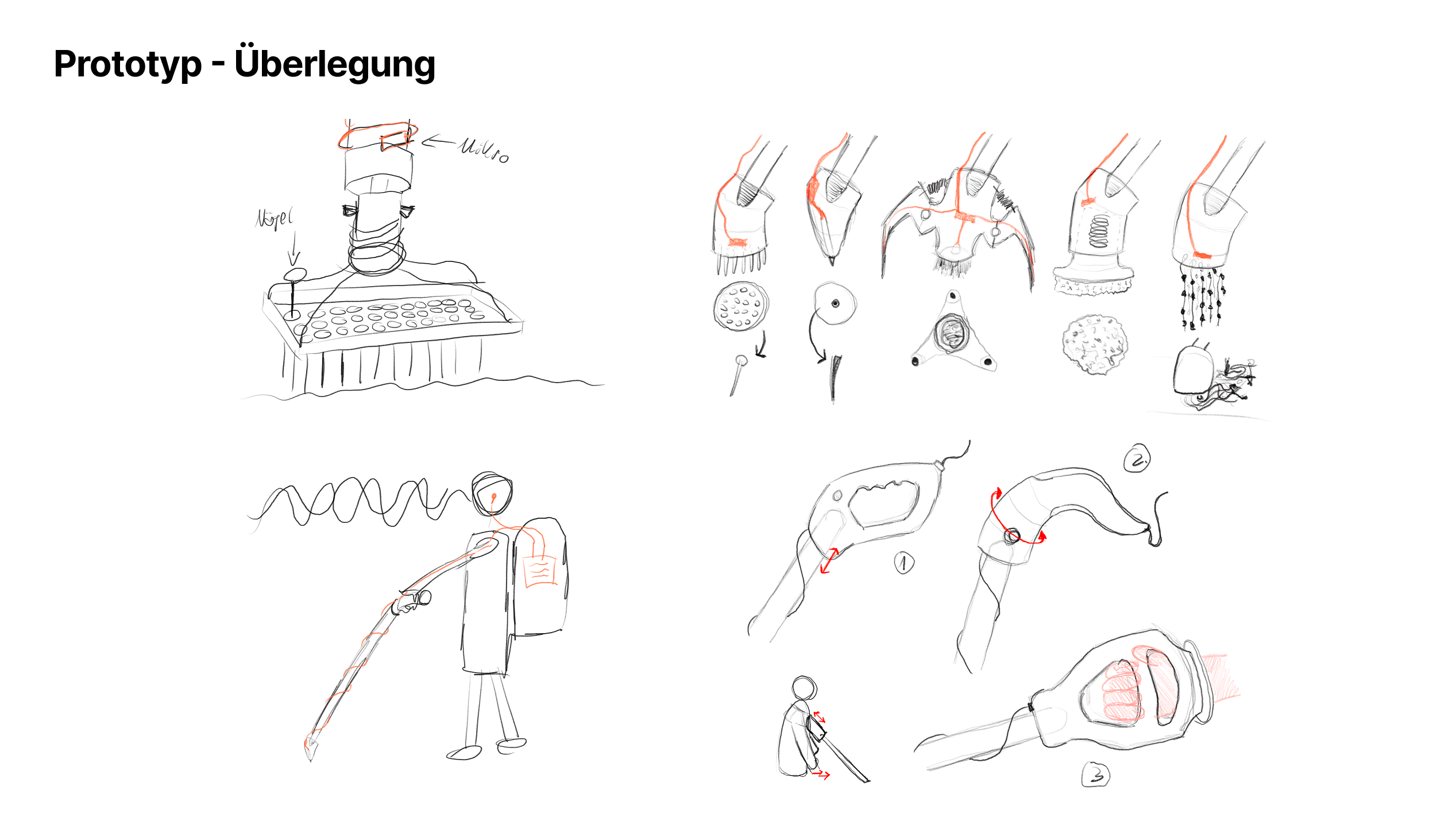
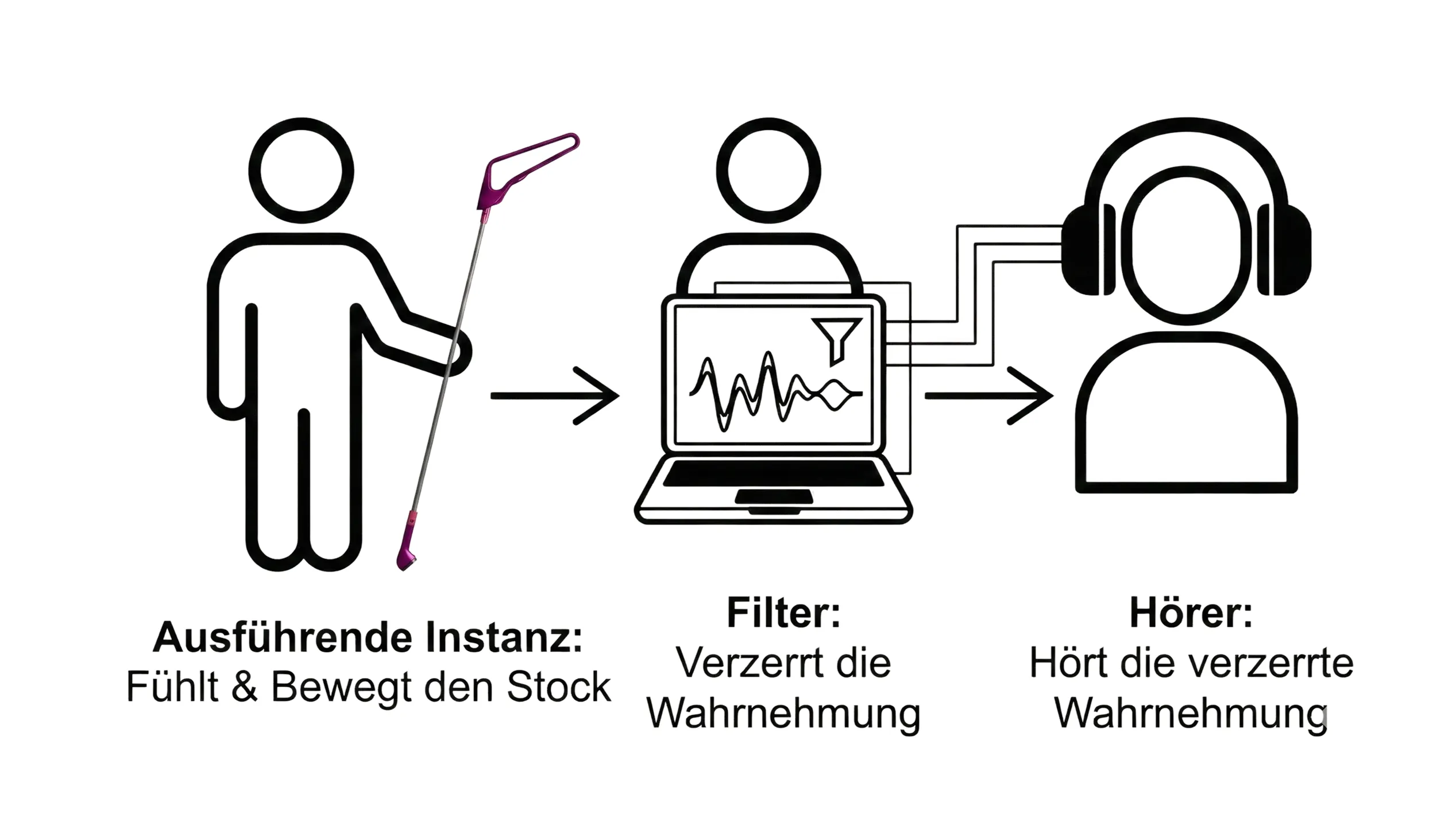
Ein modulares Stab-System mit austauschbaren Aufsätzen erfasst über ein Kontaktmikrofon Vibrationen und Materialstrukturen der Umgebung. Das Signal wird in Echtzeit audiovisuell verarbeitet: Einerseits durch verzerrte Klangausgabe über Kopfhörer, andererseits durch die dynamische Manipulation einer Point-Cloud-Visualisierung innerhalb eines Blender-Workflows.
Showroom